Sección Movimiento
La pestaña de movimiento le permite personalizar el comportamiento de las simulaciones de robots y las tolerancias utilizadas por RoboDK para mostrar o prevenir singularidades y colisiones de robots.
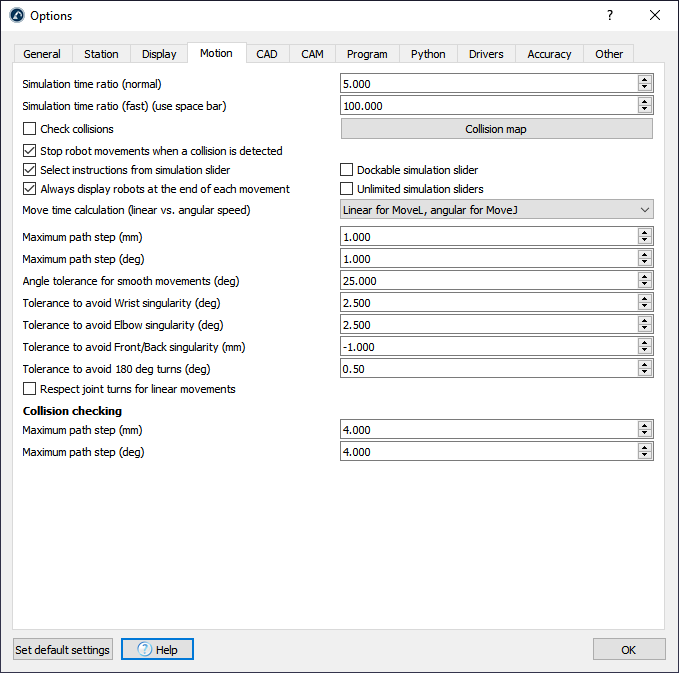
El ratio de tiempo de simulación define qué tan rápido ocurre la simulación con respecto al tiempo real. Una relación de simulación predeterminada de 5 significa que 1 segundo gastado en el simulador equivale a 5 segundos en tiempo real en el robot. Más información disponible en la sección de Ratio de simulación.



El cálculo del tiempo de movimiento define cómo RoboDK calcula el tiempo de ciclo y cómo los robots utilizan las velocidades/aceleraciones lineales/angulares para la simulación y el temporizado. Más información disponible en la Sección de tiempo de ciclo.
Si la relación de simulación es demasiado rápida, es posible que el ordenador no pueda mostrar el robot al final de cada trayectoria para mantener una simulación rápida. Para evitar este efecto: seleccione mostrar siempre los robots al final de cada movimiento.
El paso máximo de la trayectoria (mm/grad) define cómo RoboDK discretiza cualquier movimiento lineal y articular respectivamente para fines de simulación.
El umbral de tolerancia para evitar la singularidad de la articulación (grados) es el ángulo de umbral para evitar la singularidad de la articulación 5 (grados) para que se mantenga alejado de 0 grados (o cuando el eje 4 y el eje 6 son paralelos). Esta configuración se aplica a la mayoría de los brazos robóticos de 6 ejes, incluidos los robots colaborativos. Si se detecta una singularidad en un programa de robot, se debe cambiar el programa para asegurarse de que se ejecuta sin singularidades. Reducir estas tolerancias le permitirá ser más permisivo con RoboDK, pero puede experimentar advertencias o errores de singularidad con su controlador de robot real.
Se aplica una configuración similar para evitar la singularidad del codo (en grados) y la singularidad frontal/posterior (en mm).