Sección Drivers
La configuración de los controladores de robot, o Drivers le permite personalizar el comportamiento de los drivers de los robots. A diferencia de los postprocesadores (donde los programas se generan fuera de línea y luego se cargan y ejecutan en el robot), los controladores de robot le permiten mover el robot directamente desde su ordenador.
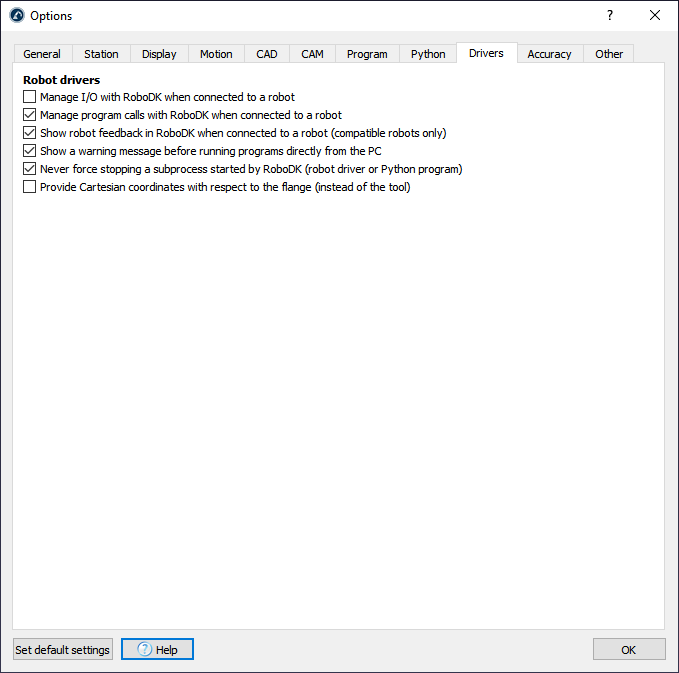
Seleccione Administrar E/S con RoboDKcuando esté conectado a un robot para simular entradas y salidas como Parámetros de Estación RoboDK en lugar de cambiar el estado de entradas/salidas en el robot real (esto es compatible con algunos controladores de robot).
La opción Mostrar comentarios del robot en RoboDK cuando esté conectado a un robot mostrará el movimiento del robot en tiempo real a medida que se mueve el robot (solo controladores de robot compatibles).
Seleccione Mostrar un mensaje de advertencia antes de ejecutar programas directamente desde el PC para mostrar una ventana emergente antes de que el programa se ejecute desde el PC (al usar la opción Iniciar en robot).
Desmarque Nunca forzar la detención de un subproceso iniciado por RoboDK si experimenta problemas con los controladores de robot. Esto asegurará que no se ejecute ningún otro proceso en segundo plano cuando se cree una nueva conexión con el robot.