Sección Pantalla
La sección Pantalla le permite personalizar la configuración relacionada con la aperiencia de la vista 3D.
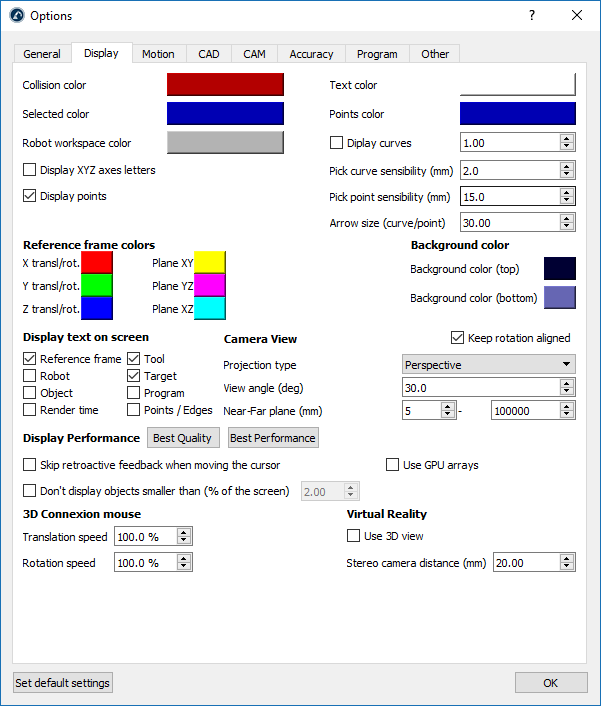
Seleccione el botón coloreado al lado del color seleccionado, color del texto, espacio de trabajo o el color de los Puntos para cambiar los colores predeterminados utilizados en la vista 3D.
Seleccione Mostrar letras de ejes XYZ para mostrar los sistemas de referencia con las letras X, Y, Z correspondientes. Por defecto, estos no se muestran y se utilizan los colores Rojo (X), Verde (Y), Azul (Z respectivamente.
Aumente la Sensibilidad de la curva/del punto de recolección para facilitar la selección de curvas y puntos respectivamente. Alternativamente, si las curvas o los puntos están demasiado cerca unos de otros y no es fácil seleccionarlos, es mejor reducir estos valores.
El tamaño de la flecha (curva/punto) es el tamaño de las flechas verdes desplegadas en la curva o en los proyectos de seguimiento de puntos (disponible en el menú de Utilidades).
Objeto/Objetivo/Ruta/Otro tamaño de referencia definirá el tamaño de los sistemas en la pantalla para elementos específicos. Se recomienda utilizar las teclas + y – en su lugar para aumentar o reducir los tamaños proporcionalmente.
Los colores del sistema de referencia pueden ser actualizados manualmente así como los colores de fondo de degradado (los colores de los planos se mostraron al mover los sistemas de referencia con el ratón).
La vista de cámara se establece como perspectiva de forma predeterminada. Es posible cambiarlo a ortográfico y actualizar algunos ajustes de la cámara como el ángulo de visión y los planos acercar/alejar.
Desmarque Mantener la rotación alineada para rotar libremente en cualquier dirección.
Por defecto, los ajustes de pantalla están configurados para obtener los resultados de mejor calidad. Establezca el rendimiento de pantalla en Mejor rendimiento si RoboDK se ralentiza porque se muestran demasiados objetos. Esto obligará a usar el GUP y no mostrará objetos pequeños en la pantalla.
También es posible mostrar RoboDK en una pantalla 3D (utilice la vista 3D para Realidad Virtual). La distancia de la cámara Estéreo definirá lo cerca o lejos que se sienten los objetos.