Sección Programa
La pestaña de Programa le permite personalizar la configuración relacionada con los programas de robot y cómo los archivos del programa son generados.
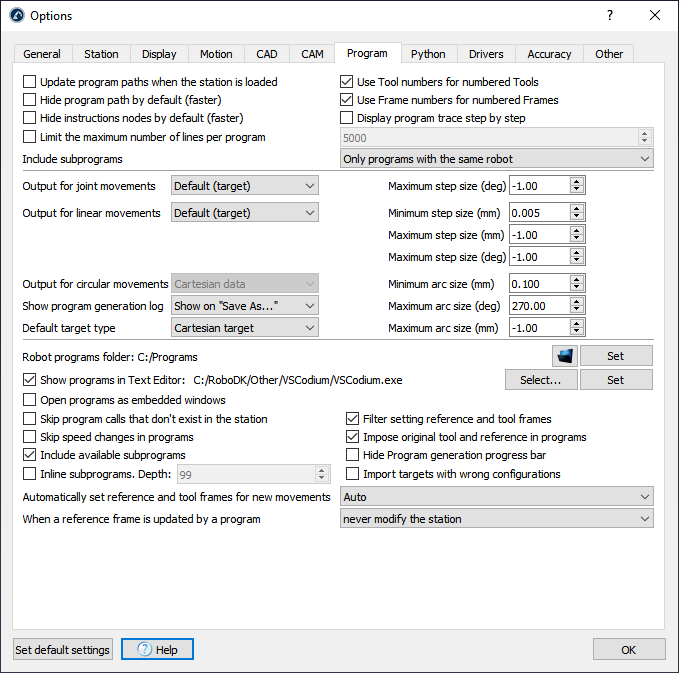
Comprobar Actualizar trayectorias de programas cuando la estación está cargada para recalcular los progrmas de robot. Esta operación mostrará los problemas del programa y mostrará los programas que tienen problemas con un signo de advertencia: 
Marcar Ocultar trayectoria de programa por defecto no mostrará las trayectorias del programa cuando se generen nuevos programas. Haga clic derecho en un programa y marque/desmarque Ruta de visualización respectivamente para mostrar/ocultar la ruta amarilla del robot TCP.
Utilice los números de Herramienta/Sistema para las Herramientas/Sistemas numerados usará los números de registro correspondientes de una herramienta/sistema de referencia en lugar de actualizar las poses de herramienta de referencia en el controlador del robot. Esto está disponible para controladores de robot que utilizan principalmente registros numerados en lugar de variables. Este comportamiento también se puede personalizar mediante postprocesadores.
Es posible forzar una posición específica Salir para movimientos articulares/lineales en la generación de programas, imponiendo datos articulares o cartesianos. De forma predeterminada, RoboDK utilizará la configuración de posición (coordenadas de articulación para posiciones de articulación y coordenadas cartesianas para posiciones cartesianas).
De forma predeterminada, RoboDK creará nuevas posiciones como posición cartesiana, lo que significa que si se mueve un sistema de referencia, la posición del robot para alcanzar esa posición será diferente. Es posible seleccionar posiciones de articulación para imponer posiciones absolutas que no cambian en función de los cambios de la referencia/herramienta.
Seleccione Omitir llamadas de programa que no existen en la estación para ignorar generar programas.
Cuando se utiliza un sistema de referencia en un programa (usando la instrucción Establecer Sistema de Referencia) y esa referencia es movida después, el movimiento del robot se verá alterado. De forma predeterminada, la instrucción de establecer el sistema de referencia colocará la referencia del robot en la ubicación original sin alterar la referencia de la estación.
Limitar el número máximo de líneas por programa puede ser marcado para especificar cuántas líneas un programa tendrá como máximo. Esto dividirá un programa largo en sub programas y generará un programa principal que ejecutará secuencialmente estos programas más pequeños. Los controladores de robots tienen una capacidad limitada y pueden ejecutar programas de un tamaño determinado. Excepto para los controladores específicos/antiguos, la mayoría de los controladores pueden manejar 5000 líneas en un programa.
Finalmente, los ajustes específicos están disponibles para marcas de robots específicas cuando se utilizan postprocesadores integrados. Por otro lado, los postprocesadores personalizados permiten personalizar o imponer cierto comportamiento justo antes de que sea generado el programa.