Crear un proyecto de paletización
El proyecto de paletizado le ayudará a automatizar el proceso de paletizado del robot. Esta sección describe las principales características de los ajustes de paletizado que puede personalizar.
Siga estos pasos para crear un proyecto de paletización:
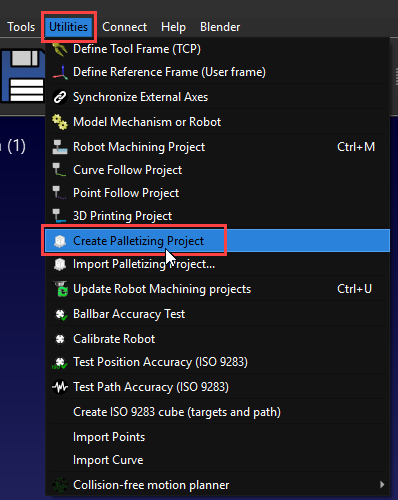
1.Navegue hasta Utilidades y seleccione "Crear proyecto de paletización".
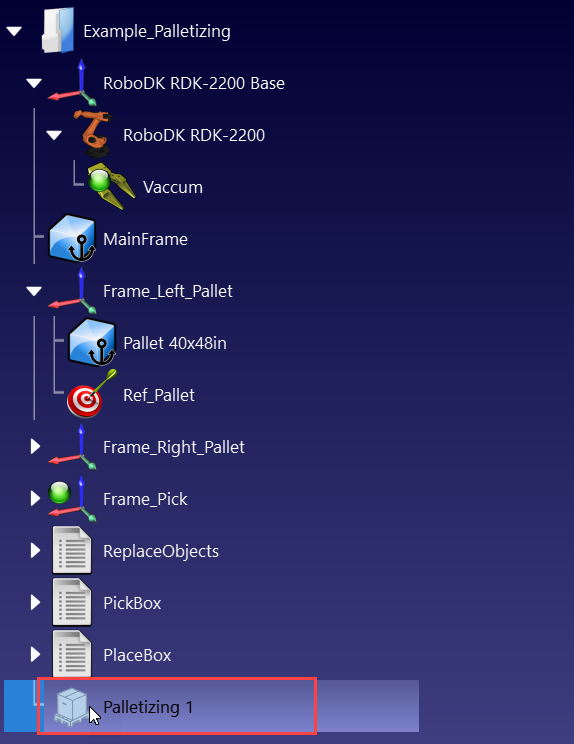
2.Haga doble clic en "Paletizado 1" en el árbol de estaciones.
Ponga en marcha su proyecto de paletización
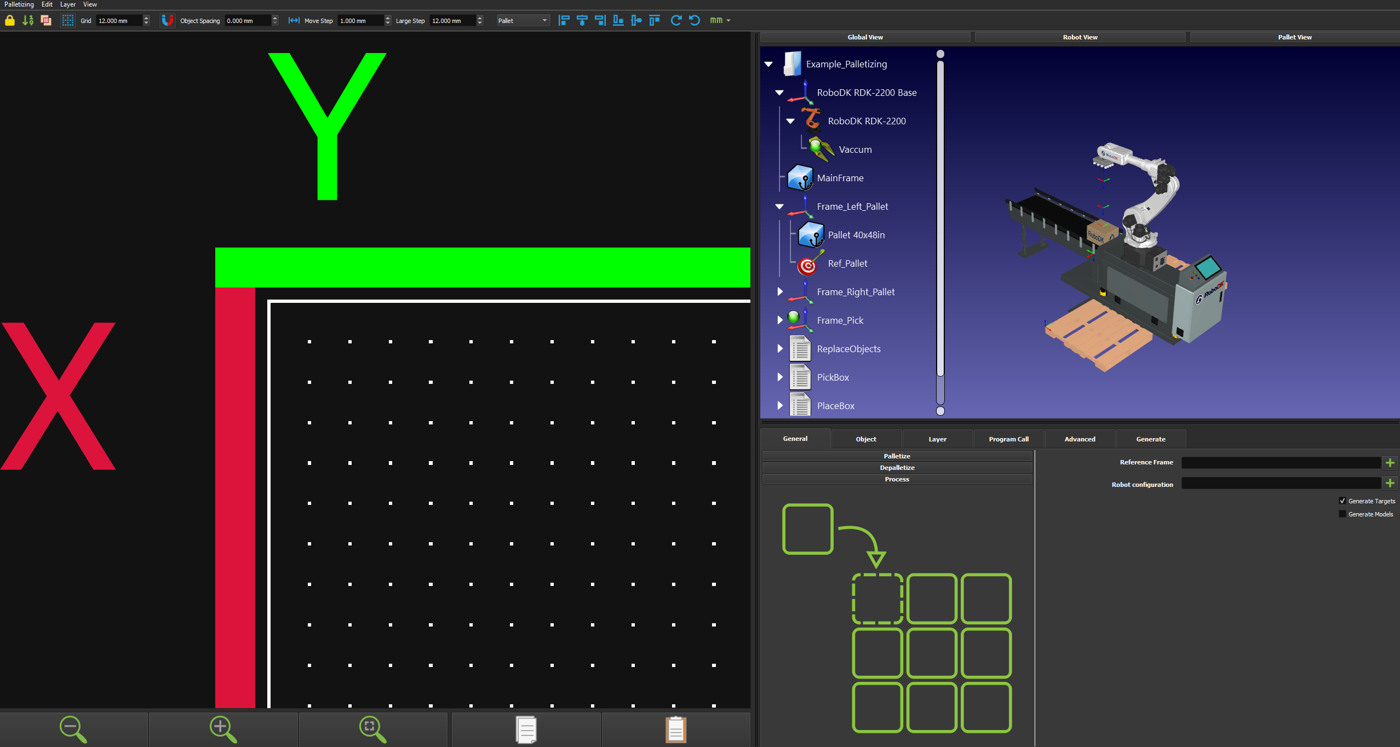
Al abrir la interfaz principal del menú de paletizado, puede elegir entre paletizar, despaletizar o configurar el proceso (que incluye ambos).
Siga estos pasos para configurar su proyecto de paletizado:
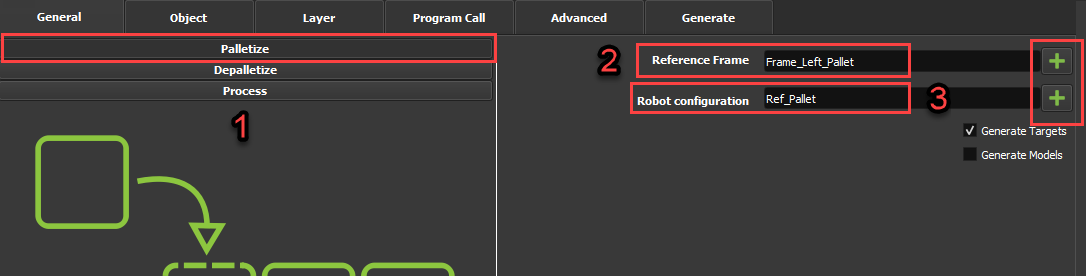
1.Seleccione la opción "Paletizar", haga clic en el botón "+" de "Marco de referencia" y seleccione el sistema de coordenadas de su paleta. A continuación, haga clic en el botón "+" de "Configuración del robot" y elija el objetivo "Ref_Palet" que creamos anteriormente.
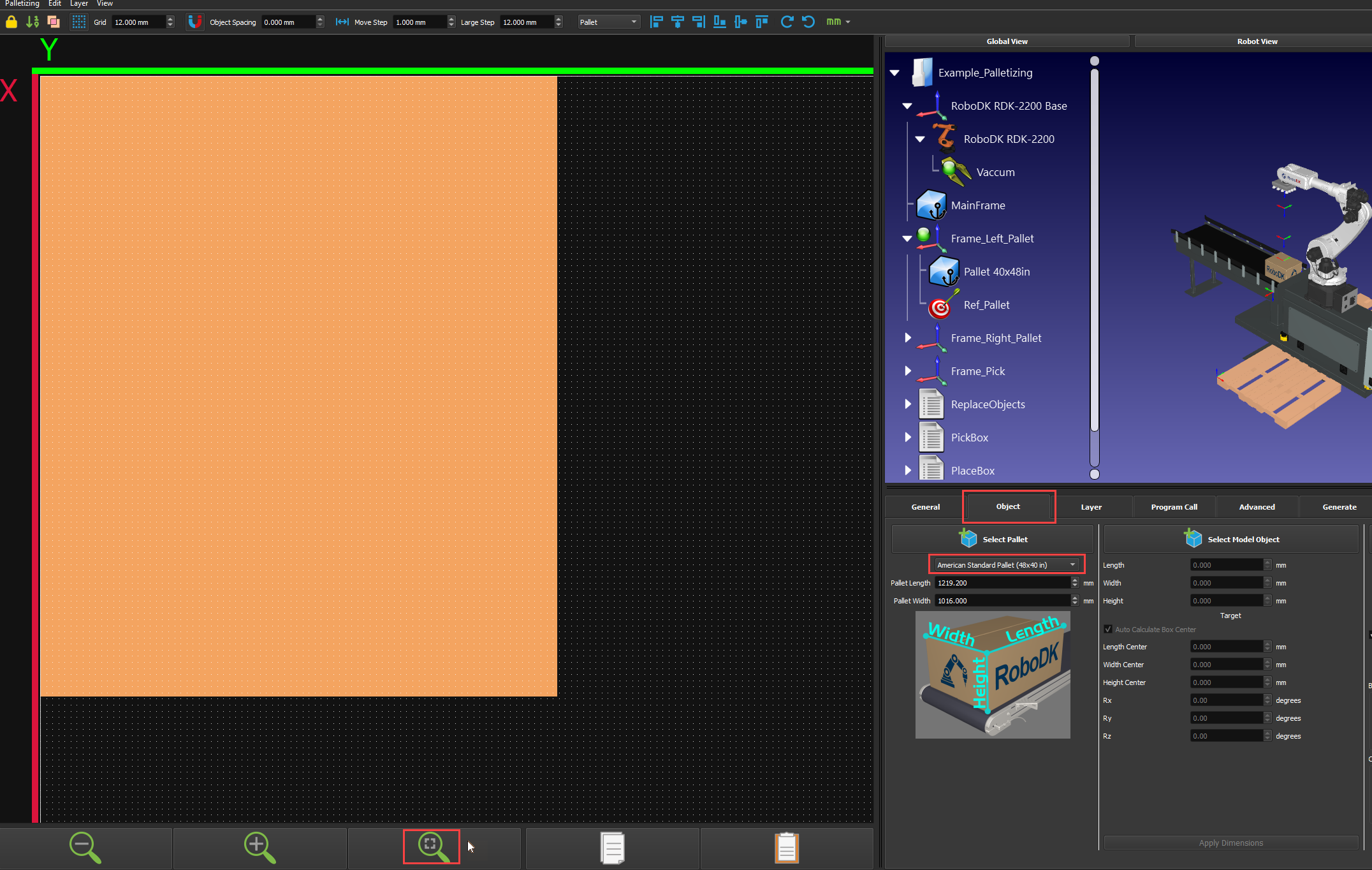
2.Seleccione la pestaña Objeto para configurar las dimensiones de sus palés y cajas.
3.Seleccione uno de los preajustes para las dimensiones de su paleta o introduzca sus dimensiones manualmente. A continuación, haga clic en el icono "Zoom para ajustar" para que la paleta 2D pueda mostrarse correctamente en su totalidad.
4.Seleccione uno de los preajustes para su caja o introduzca sus dimensiones manualmente y haga clic en "Crear objeto"
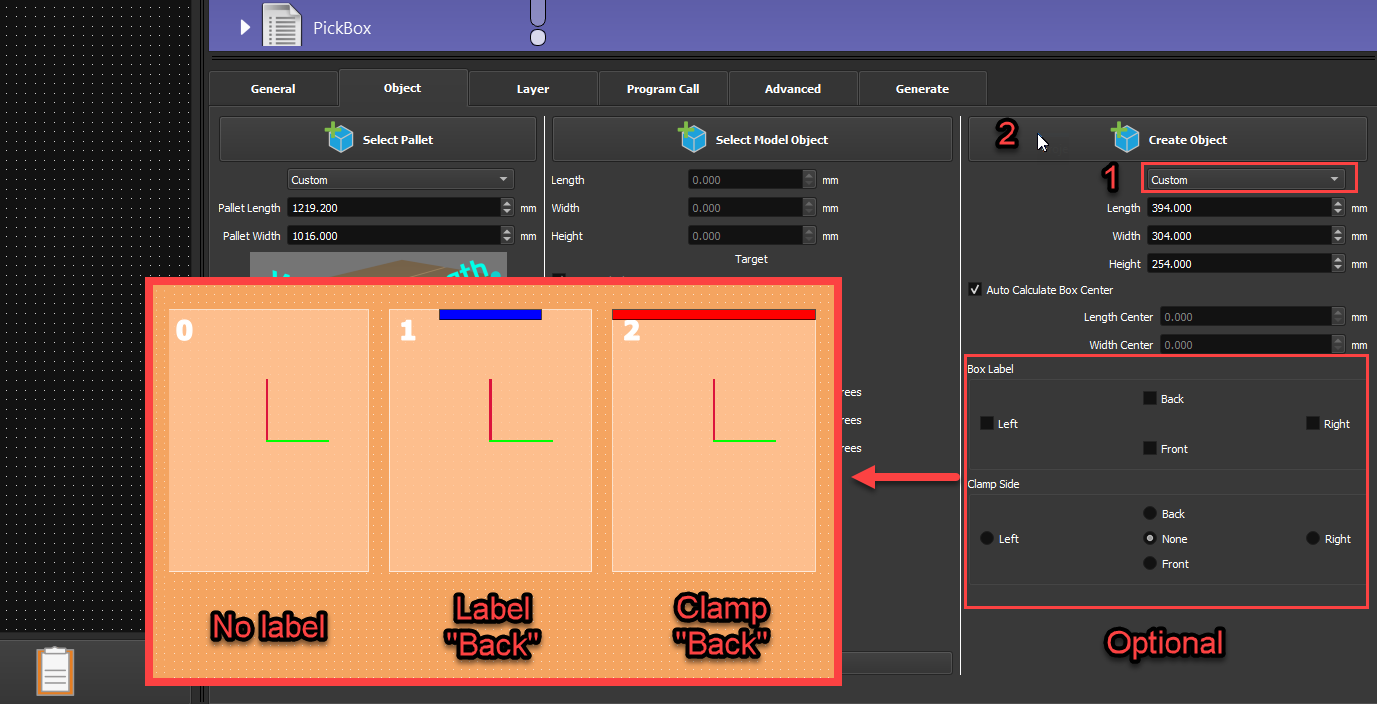
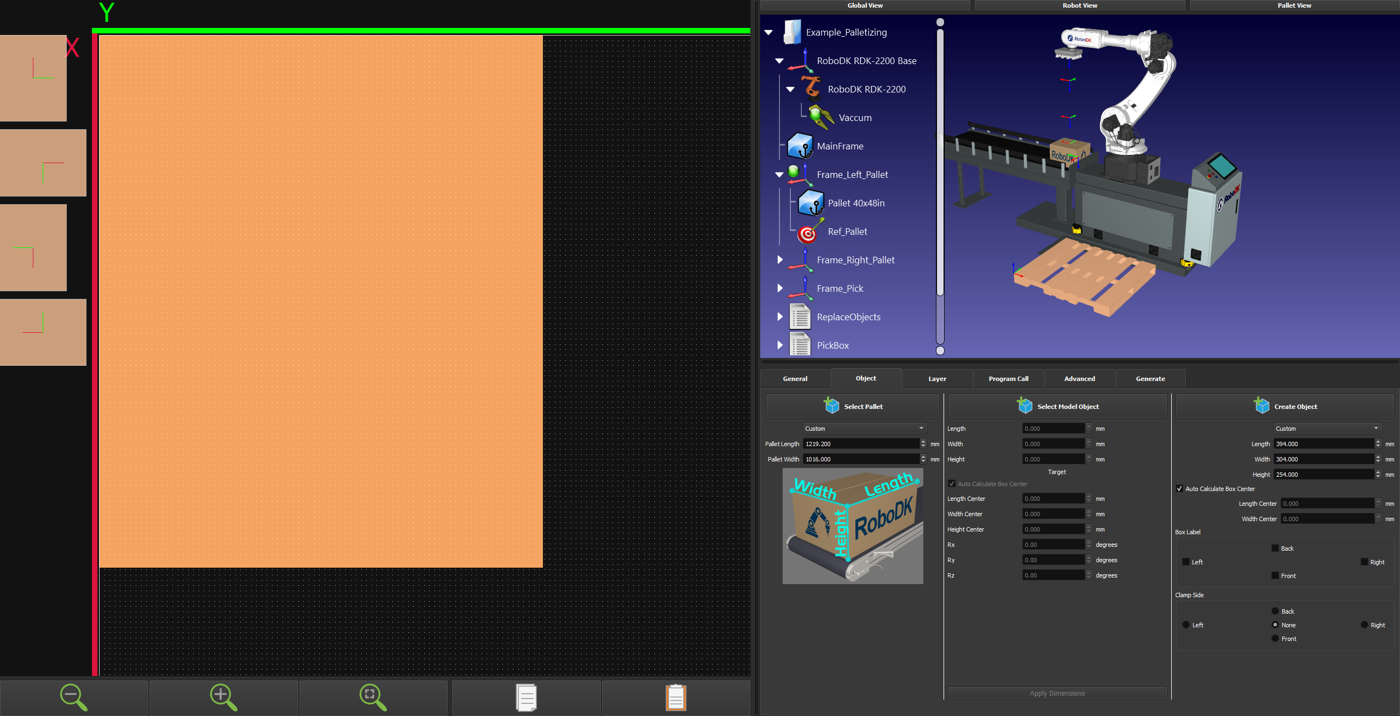
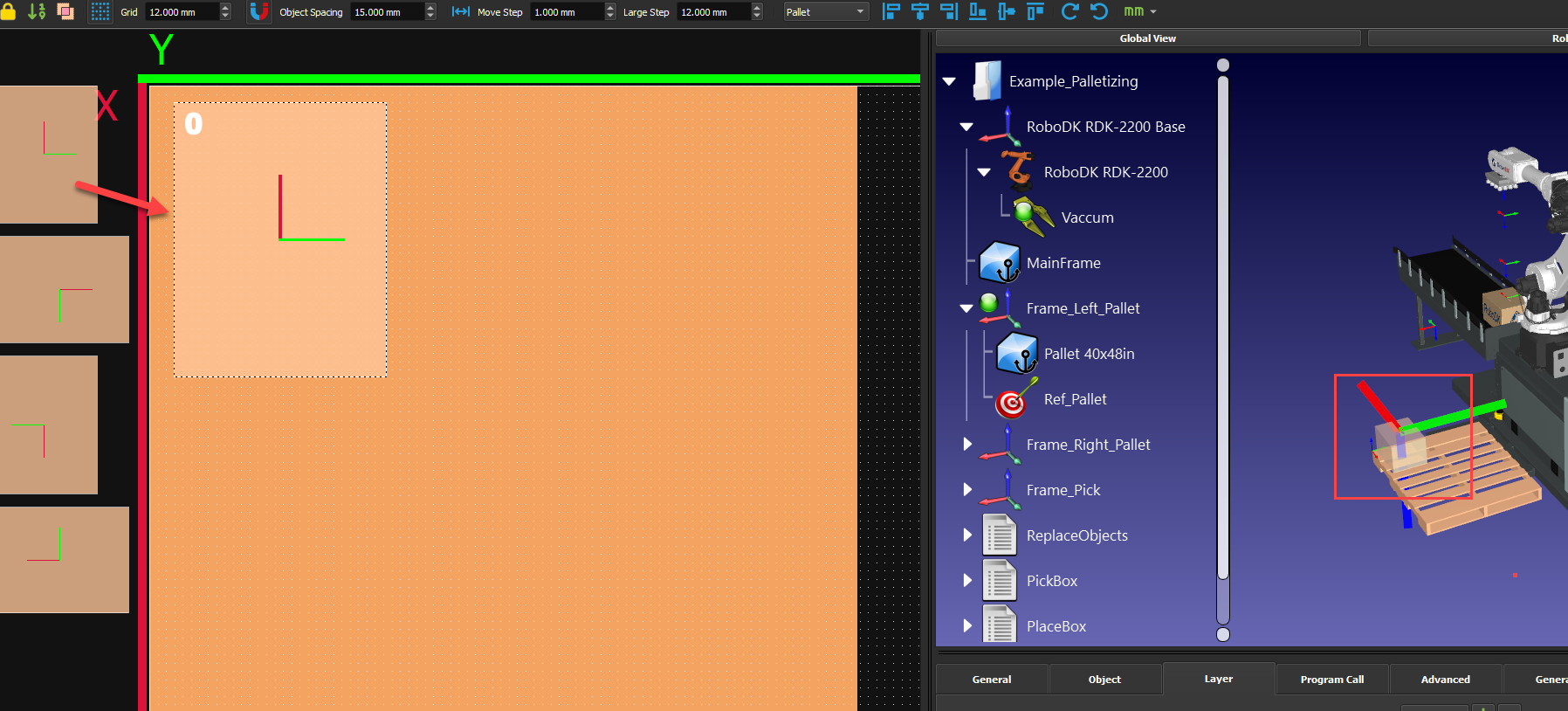
5.Una vez que haya hecho clic en Crear objeto, aparecerán 4 casillas en la parte izquierda de la pantalla. Un recuadro por cada posible rotación de 90 grados. Una línea roja y otra verde mostrarán la rotación del TCP alrededor del eje Z.
Crear diseño de capas
Las capas de paletización le permiten diseñar cómo desea colocar los objetos en cada capa de su paleta y definir adecuadamente su disposición preferida.
Siga estos pasos para crear el diseño de su capa:
1.Desplácese a la pestaña Capa para crear su diseño de capa.
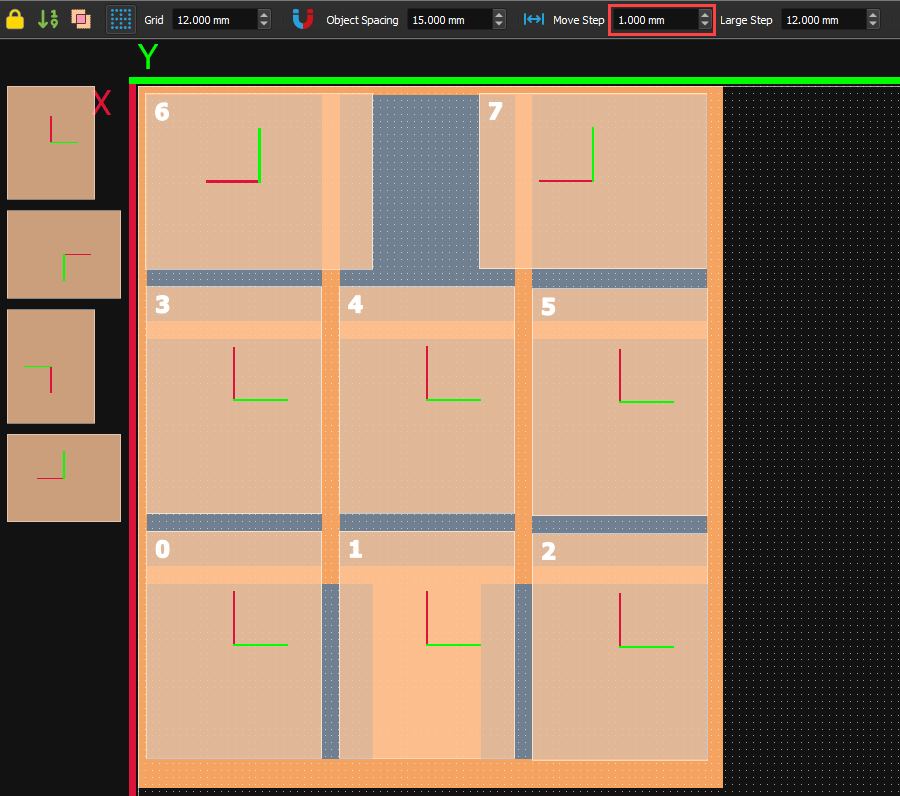
2.Asegúrese de que la cuadrícula de su maqueta está ajustada según sus necesidades. En este caso, estaremos utilizando 12mm. También puede cambiar el valor en "Espaciado entre objetos" para tener un espacio constante entre sus cajas; nosotros utilizaremos 15mm.
3.Seleccione una caja de la izquierda y arrástrela y suéltela en la paleta.
4.Mientras mueve la caja en la interfaz 2D, ésta aparecerá en el entorno 3D. Si la caja en el entorno 3D se vuelve roja, significa que está fuera del alcance del robot.
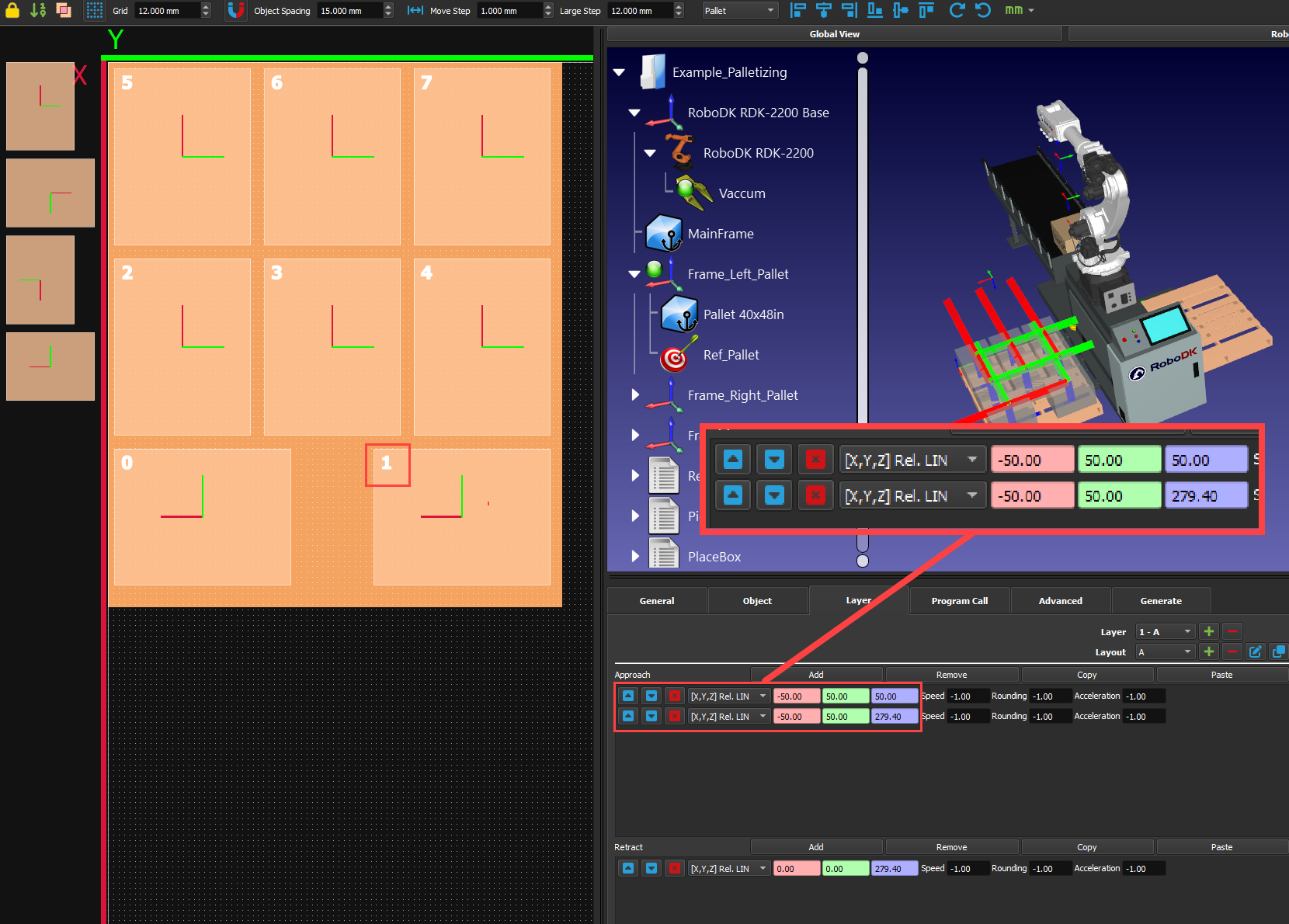
5.Cree su primera disposición de capas. El número que aparece en la parte superior izquierda de las casillas representa el orden en el que se colocarán. Puede hacer clic con el botón derecho en las cajas para modificar su orden. También puede añadir líneas para que se aproximen o retraigan con respecto a sus cajas. Puede tomar los valores de este ejemplo, pero no es obligatorio. Juegue con ellos para ver lo que aporta a su programa.
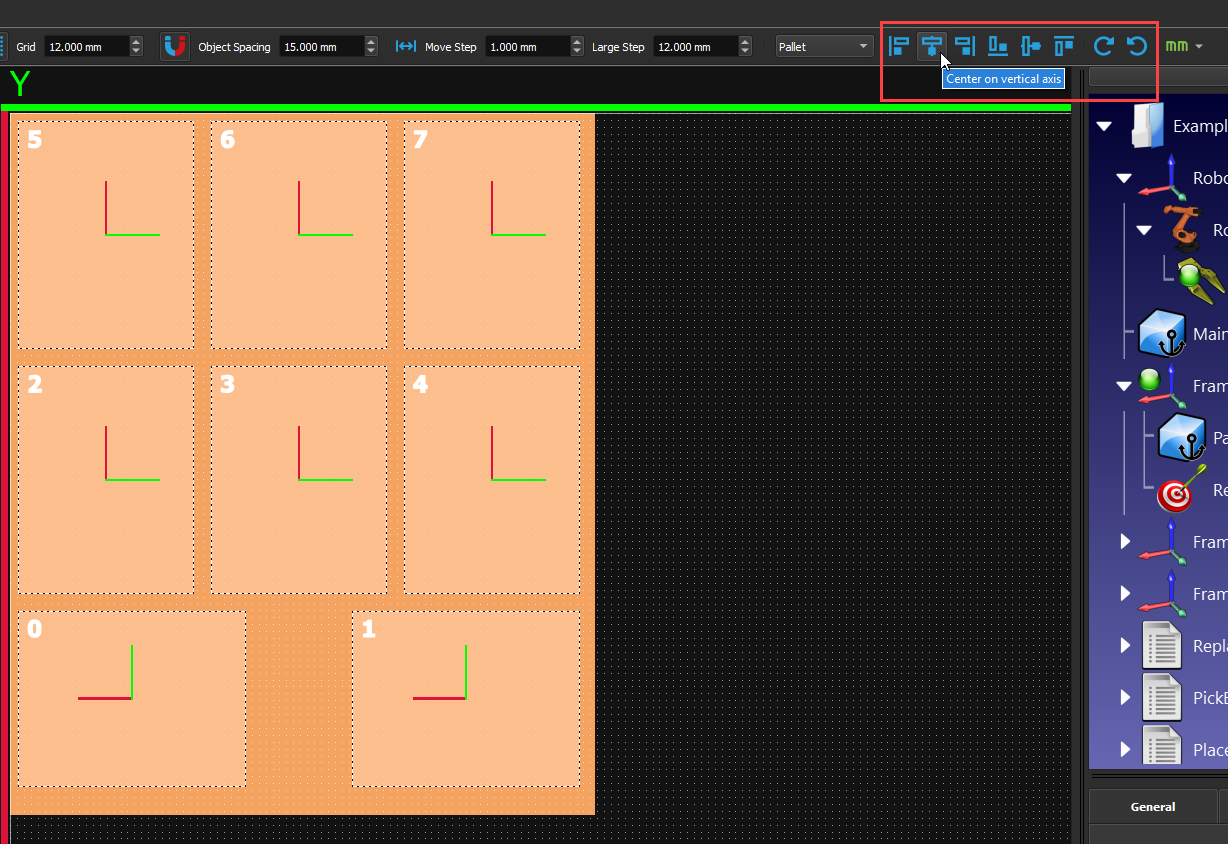
6.Puede realinear sus cajas fácilmente con los diferentes botones de alineación de la parte superior derecha. Seleccione todas sus cajas y haga clic en las diferentes opciones hasta que esté satisfecho. También puede girar sus cajas en lugar de generar otras nuevas con la orientación correcta.
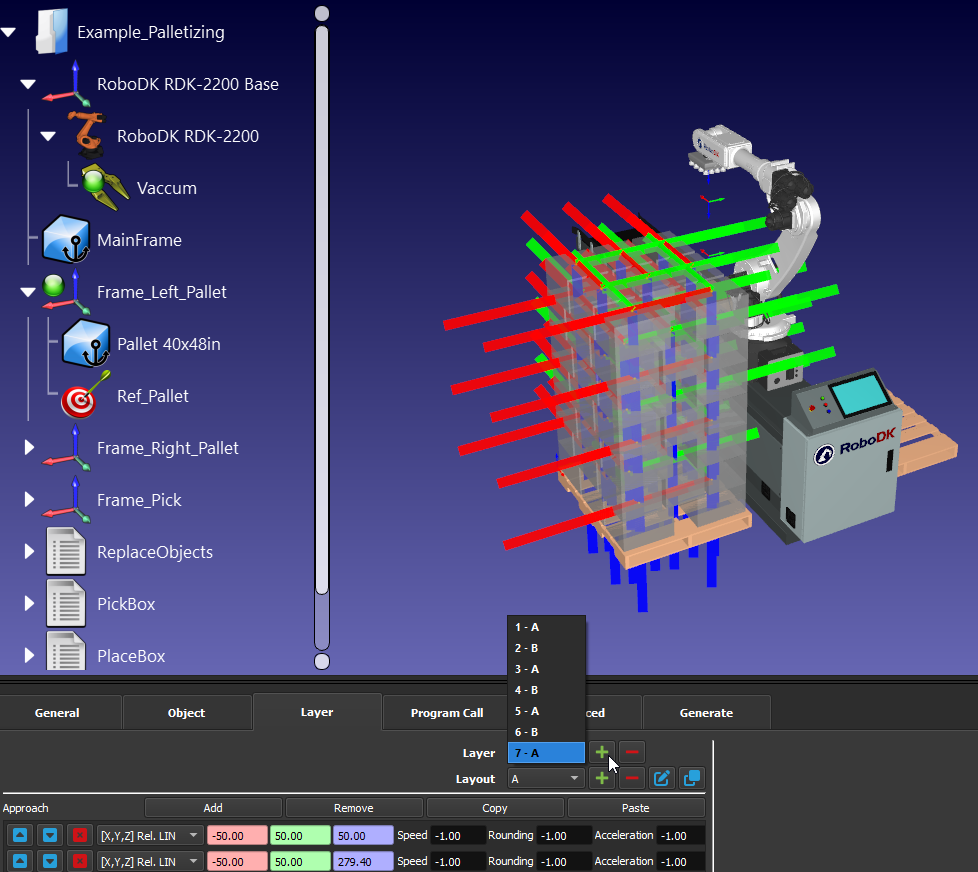
7.Añada una nueva capa a la pila pulsando el botón "+ " situado junto a "Capa". Al añadir una nueva capa se copiará el mismo patrón que la capa situada debajo de ella.
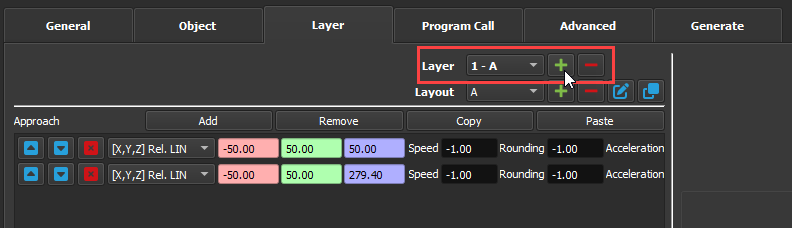
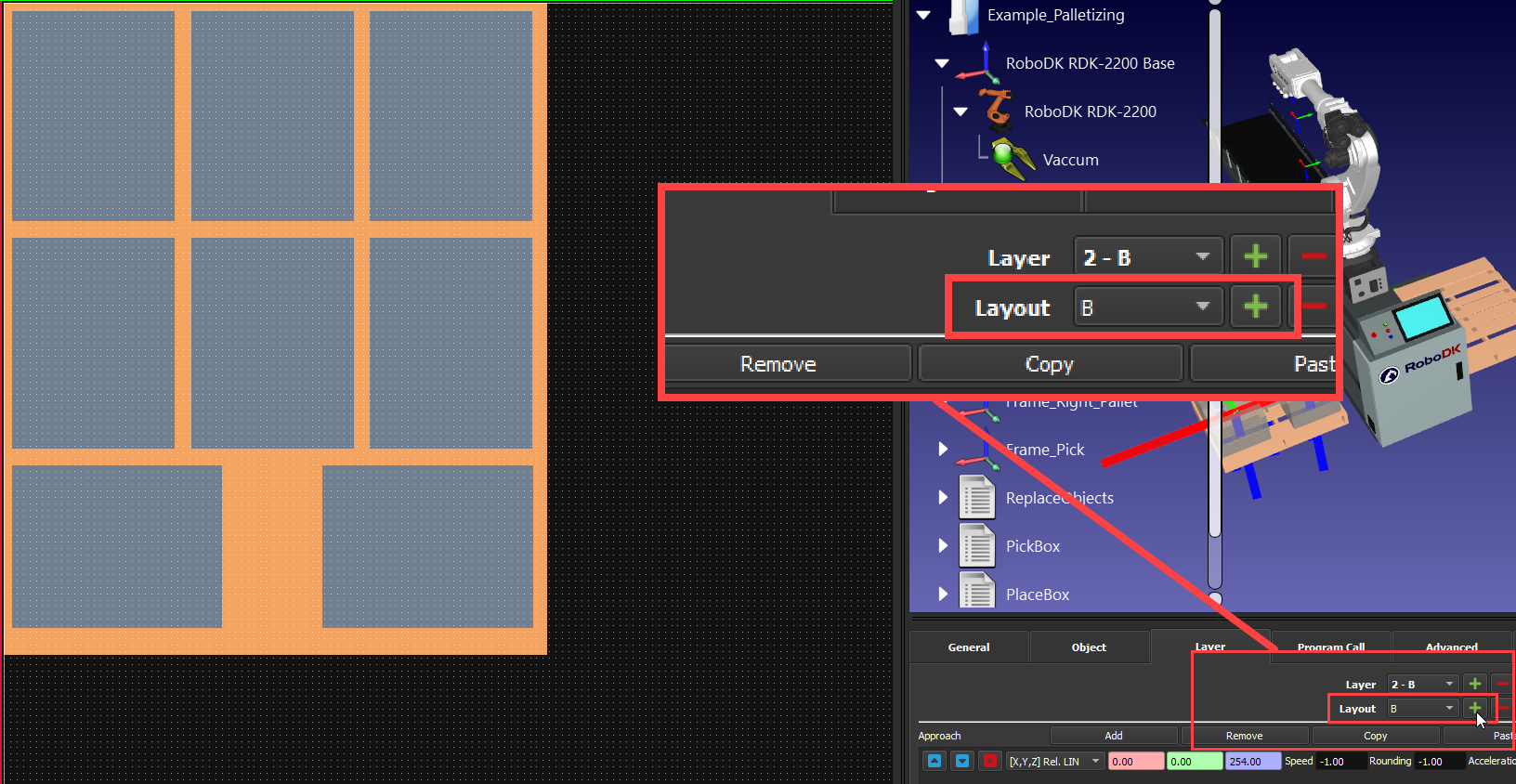
8.Puede crear una nueva disposición (patrón) pulsando el botón "+ " situado junto a "Disposición". Seguirá viendo el diseño de la capa anterior en gris para que pueda colocar las nuevas cajas correctamente encima de ellas.
9.Cree su diseño alternativo. Puede ajustar con precisión la posición de las cajas manteniendo pulsada la tecla CTRL y utilizando las flechas del teclado. Puede cambiar el tamaño de este incremento en "Paso de movimiento" en la parte superior de la ventana.
10.A continuación, puede añadir el número de capas que desee y puede elegir alternar entre ellas. Sólo tiene que fijarse en los colores de las cajas en la vista 3D para asegurarse de que todas siguen estando al alcance del robot.
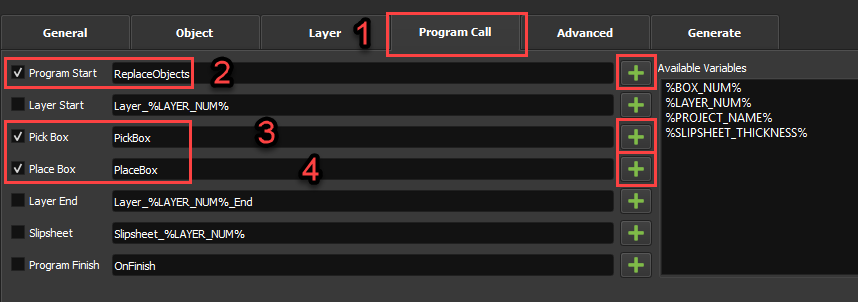
11.En la pestaña "Llamada a programa", puede seleccionar programas para diferentes eventos haciendo clic en el botón "+" y luego "marcar" la casilla correspondiente. Por ejemplo, necesita elegir al menos un programa de "Caja de Recogida" y otro de "Caja de Colocación", de lo contrario, no tendrá un proyecto que funcione. En este ejemplo, también utilizaremos un programa "Inicio de programa", pero podría crear un programa "Ir a casa" y seleccionarlo en "Final de programa" para que el robot vuelva a casa una vez que el palé esté terminado.
Generar programa de robot
Una vez que haya completado todos los pasos de preparación, podrá generar el programa del robot. A continuación, podrá generar el programa del robot con el postprocesador adecuado para su marca de robot.
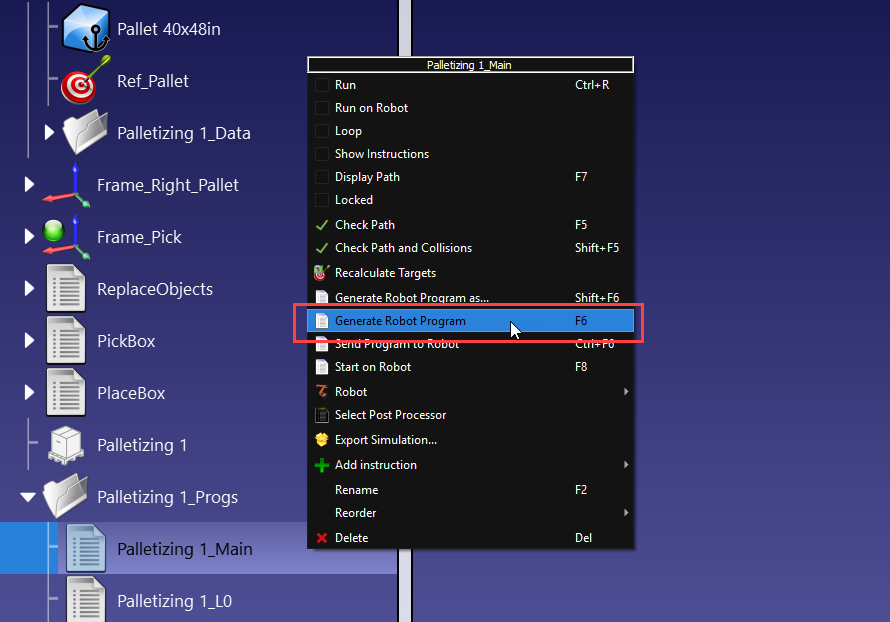
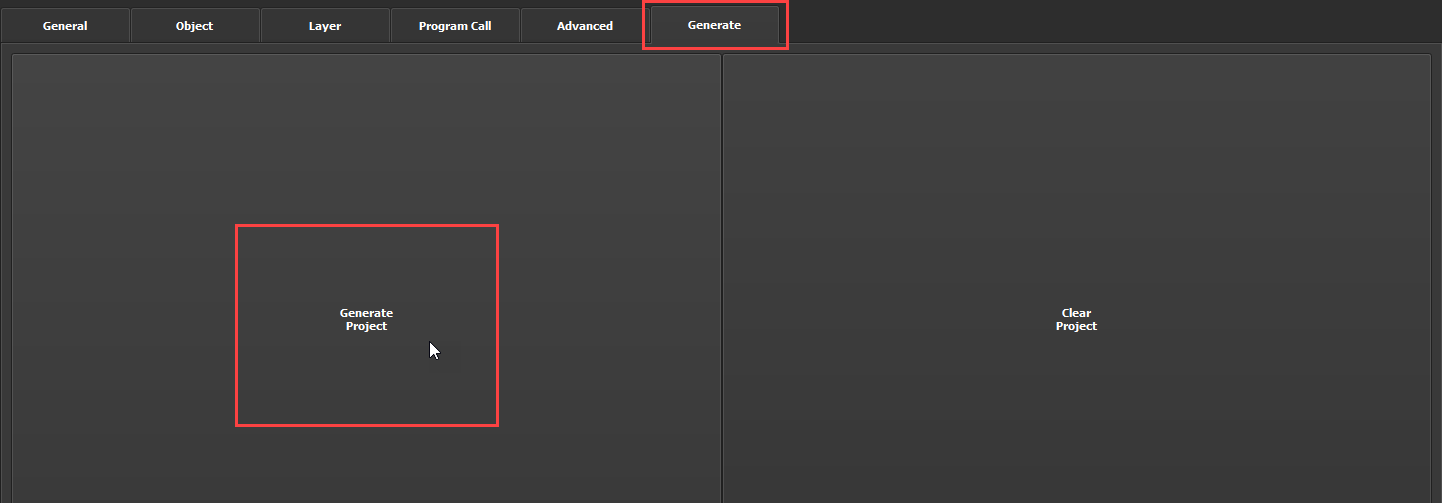
1.En la pestaña "Generar", haga clic en "Generar proyecto". Ahora puede cerrar la ventana para volver a su proyecto. Ahora debería tener un programa principal y programas individuales para cada capa.
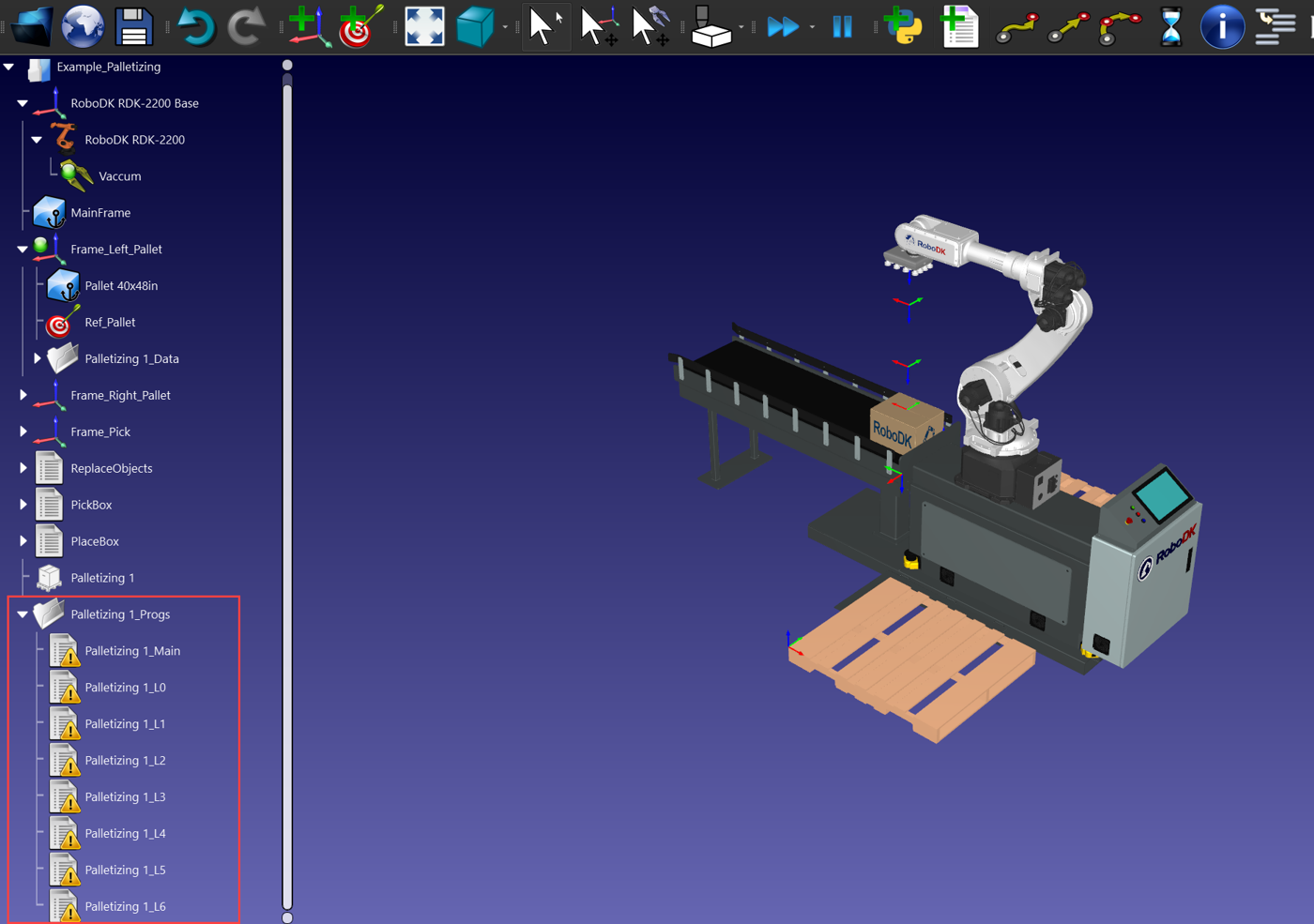
2.Haga doble clic en "Paletizado 1_Main" para ejecutar el programa principal. Si está satisfecho con los resultados, haga clic con el botón derecho del ratón en el programa principal y seleccione "Generar programa de robot" para crear el programa que su controlador de robot puede ejecutar.