Cómo preparar su estación
Para crear un proyecto de paletizado, primero debe configurar correctamente su estación en RoboDK.
Siga estos pasos para configurar correctamente su estación:
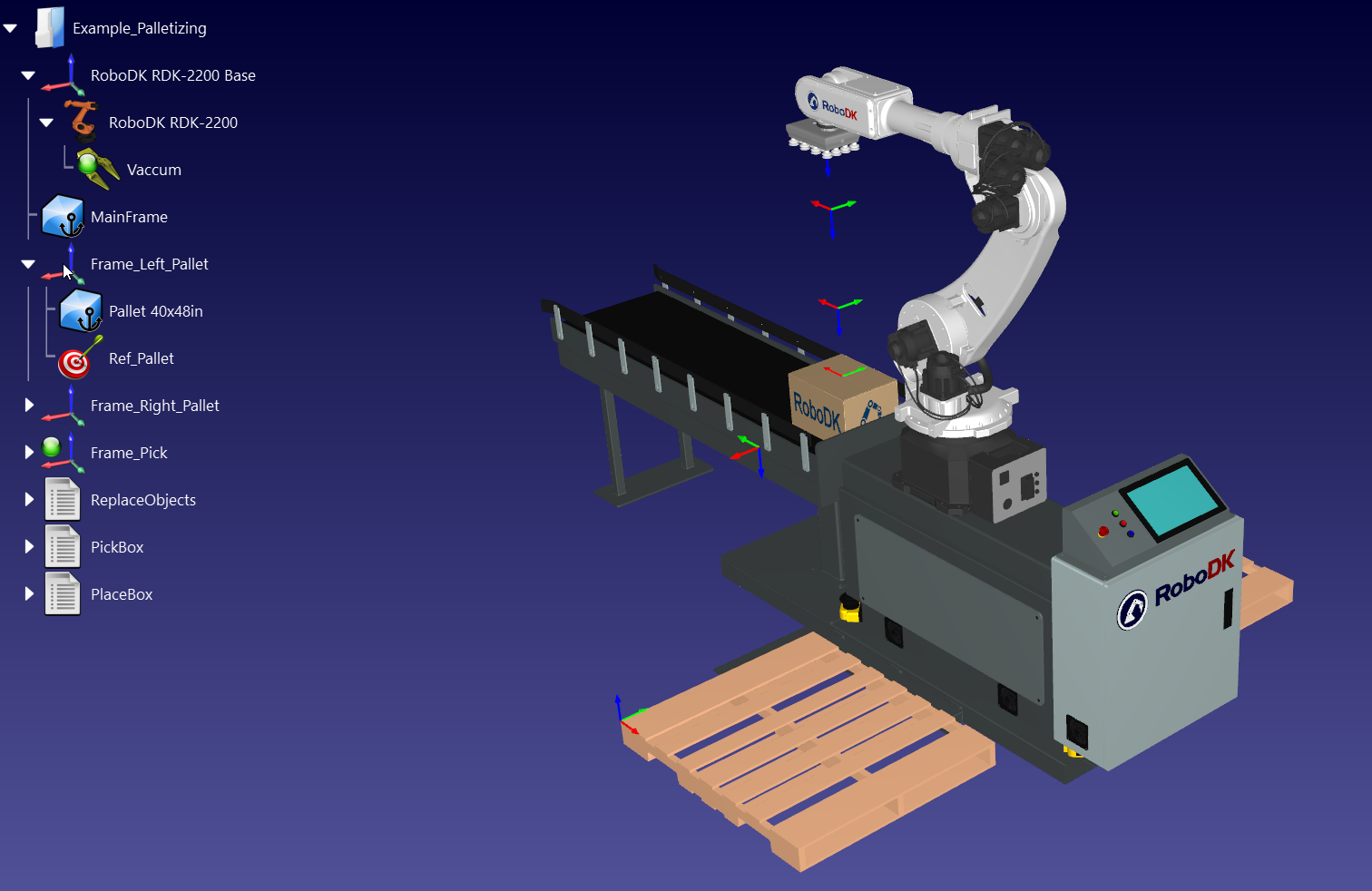
1.Debe cargar un robot, una herramienta, una caja, un sistema de coordenadas en el que va a enseñar a sus objetivos a recoger la caja (ej.: Marco_Recoger), un palé y un sistema de coordenadas en la esquina de su palé (ej.: Marco_Palé). También puede cargar un transportador si dispone de uno.
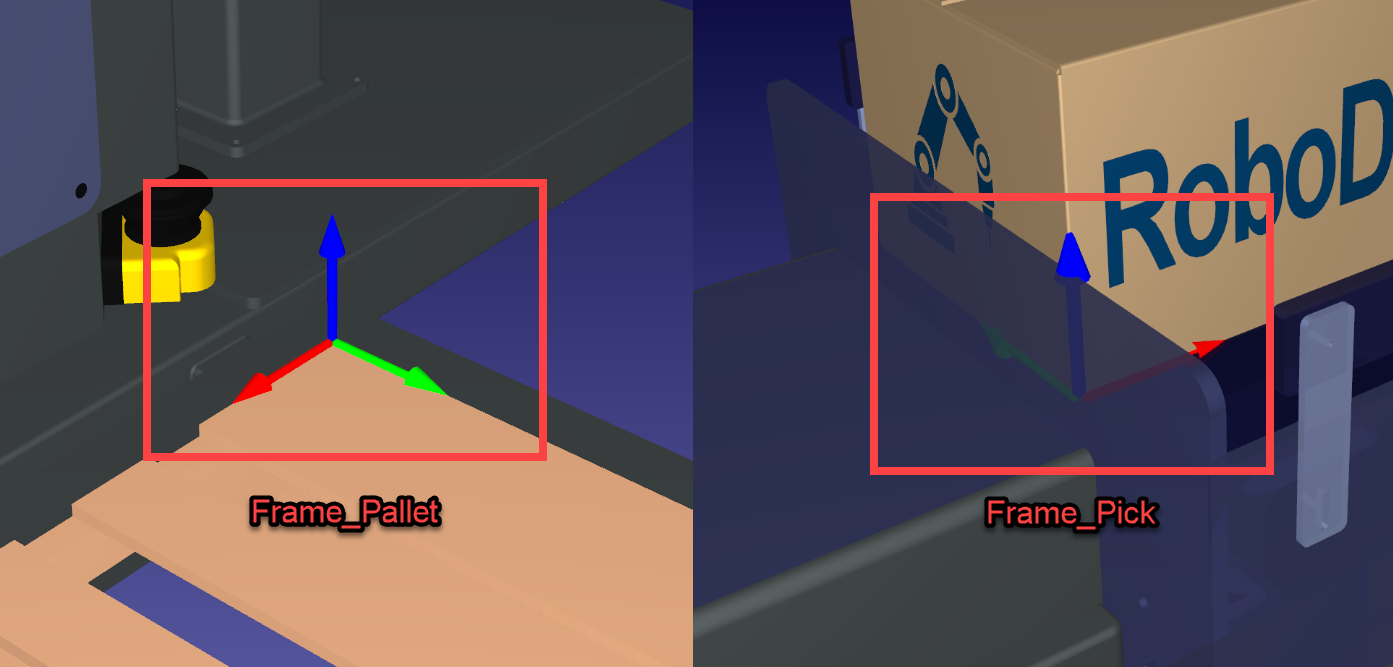
2.Los sistemas de coordenadas de la paleta deben orientarse con su eje X+ apuntando en la dirección de la longitud de la paleta.
3.Los sistemas de coordenadas de la paleta deben orientarse con su eje Z+ normal a la paleta (apuntando hacia arriba).
4.Asegúrese de asociar el palé y la caja con sus respectivos sistemas de coordenadas. Esto es para asegurarse de que si necesita moverlos, los objetivos del robot actualizarán automáticamente su posición en tiempo real.
5.Reposicione los distintos objetos/marcos según sea necesario.
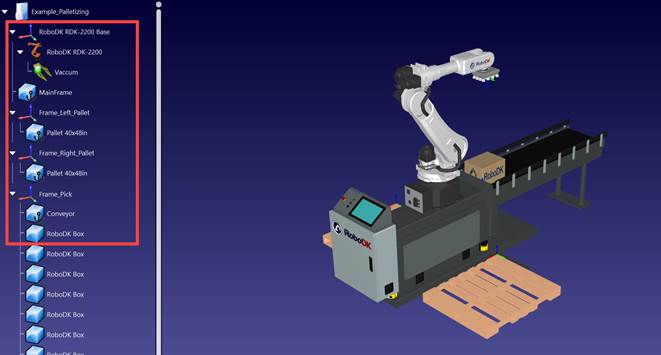
6.Clone la caja varias veces y pegándola en el "Frame_Pick" para poder hacer múltiples picks.
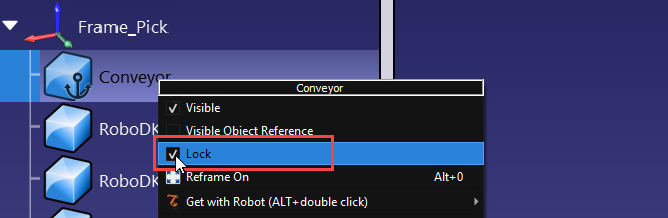
7.Asegúrese de bloquear sus objetos 3D, pero no las cajas, en su marco haciendo clic con el botón derecho y luego en "Bloquear".
Crear Pick and Drop
El asistente de paletización requiere que usted proporcione un subprograma para elegir una nueva caja y un subprograma para colocar la caja. El programa "ColocarCaja" sólo sirve para separar la caja de la pinza y transferirla al marco de su paleta; los objetivos de colocación propiamente dichos serán creados automáticamente por el Addin de paletización más adelante.
Siga estos pasos para crear un programa de picking "PickBox" y un programa de descenso "PlaceBox":
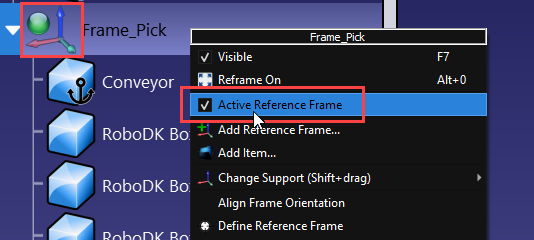
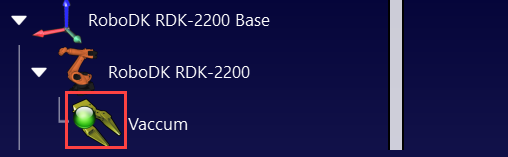
1.En primer lugar, asegúrese de activar el "Frame_Pick" y de tener su herramienta activa antes de crear nuevos objetivos. Deberían tener un círculo verde si están activos.
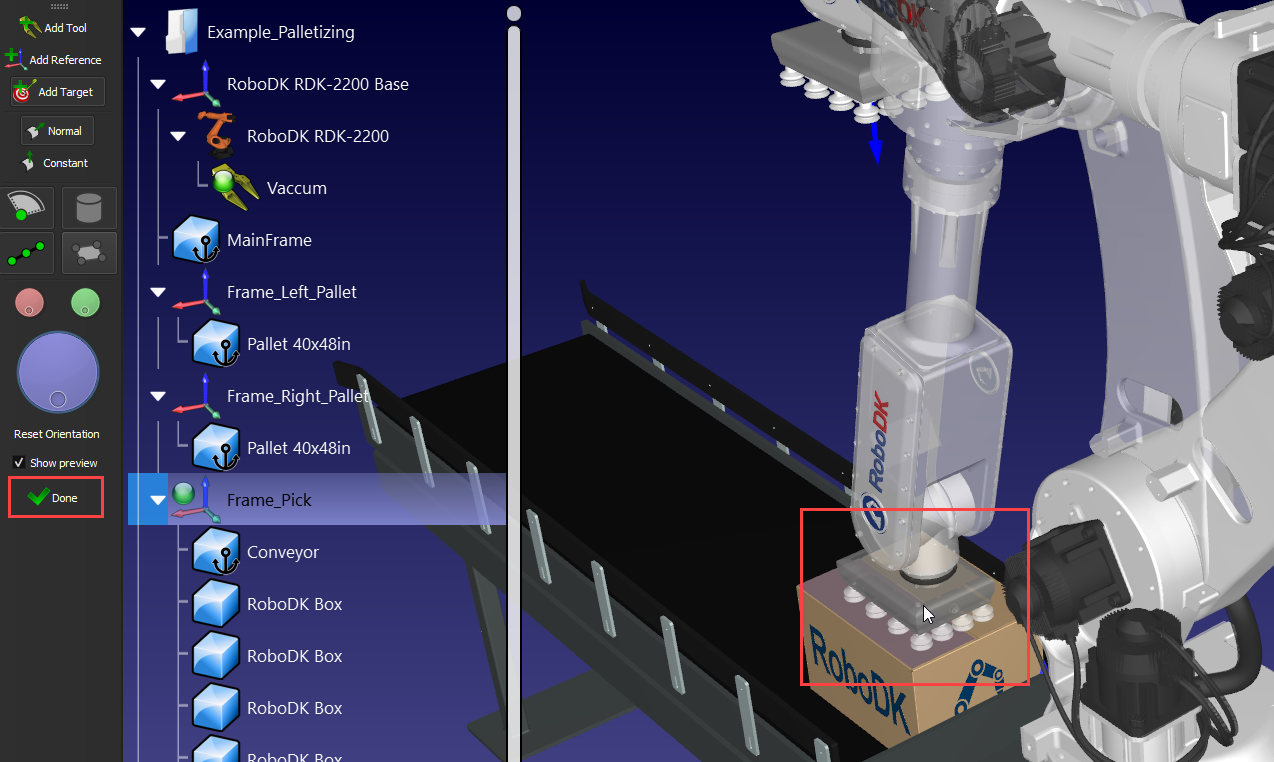
2.En la pestaña "Programa", seleccione "Enseñar objetivo(s) en superficie". Haga clic en la parte superior del recuadro y, a continuación, en "Hecho".
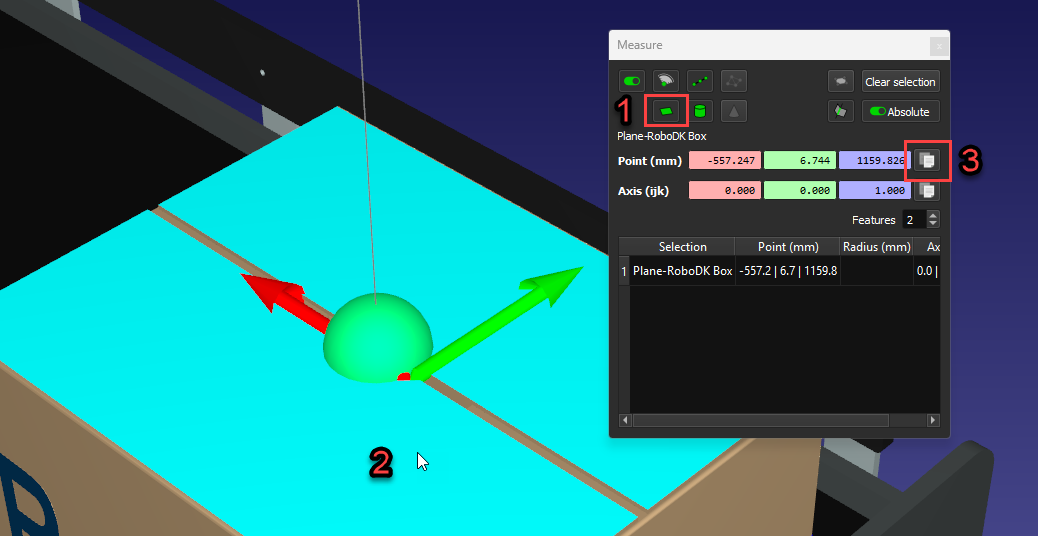
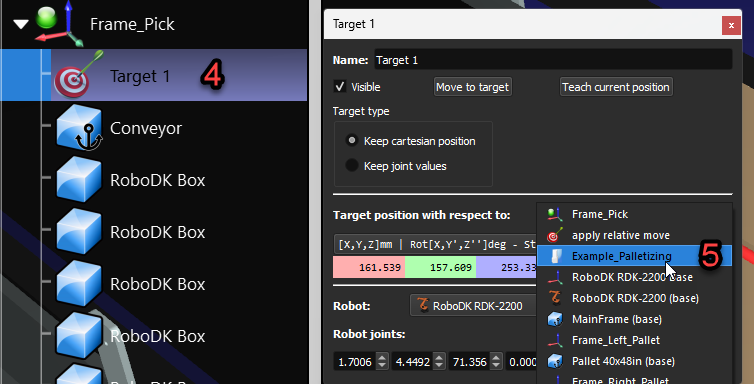
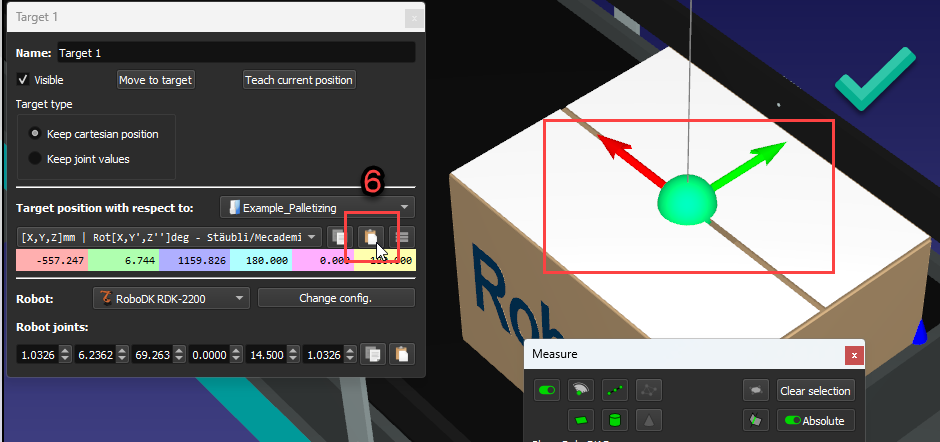
3.Ahora debería tener su primer objetivo en la parte inferior del "Recuadro_Pick". Para asegurarse de que está centrado en la parte superior de la caja, mantenga pulsadas las teclas MAYÚS+M para abrir la herramienta de medición y, a continuación, haga clic en la parte superior de la caja y copie los valores. A continuación, haga clic en su objetivo, pulse F3 para editar los parámetros del objetivo. Elija el origen de la estación como referencia y pegue los valores. El objetivo debería estar ahora en el centro de la caja.
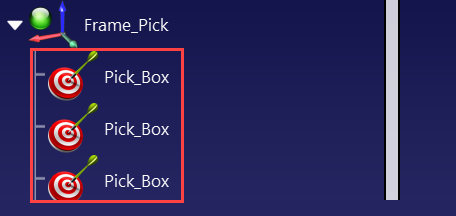
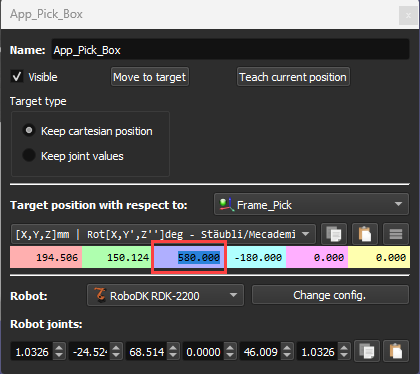
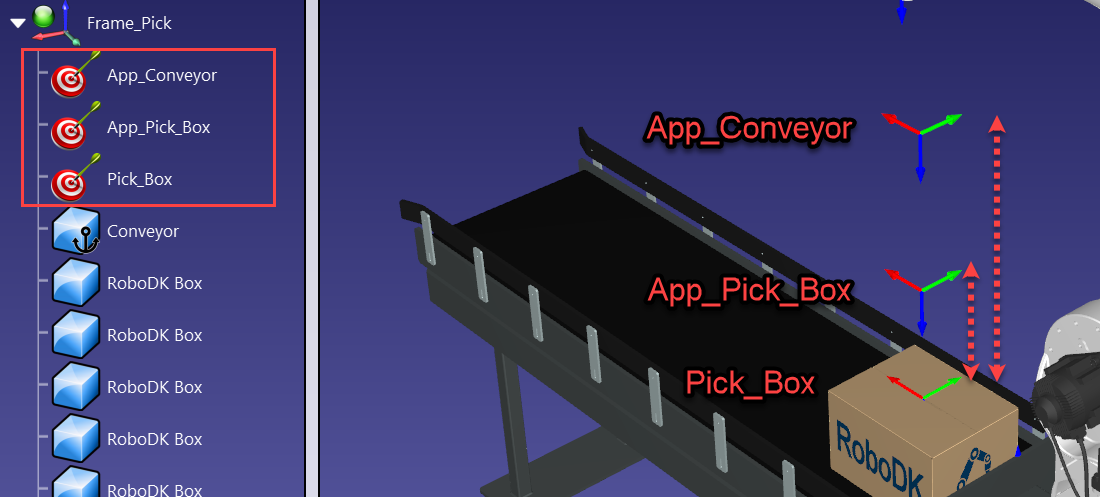
4.Renombre su objetivo "Pick_Box" y luego cópielo/péguelo dos veces en el "Marco_Pick". Cámbieles el nombre a "App_Pick_Box" y "App_Conveyor". A continuación, edite los parámetros del objetivo y añada algo de distancia en los valores Z utilizando su rueda de desplazamiento hasta que esté satisfecho con las posiciones del objetivo.
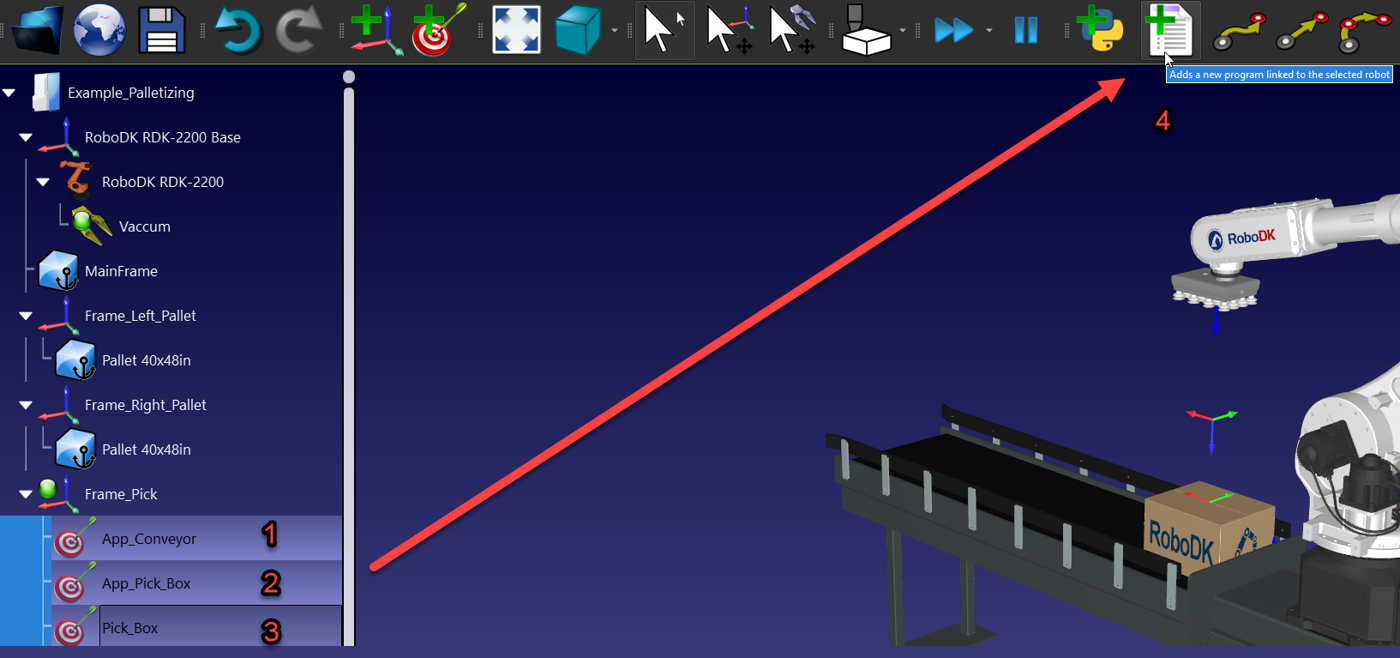
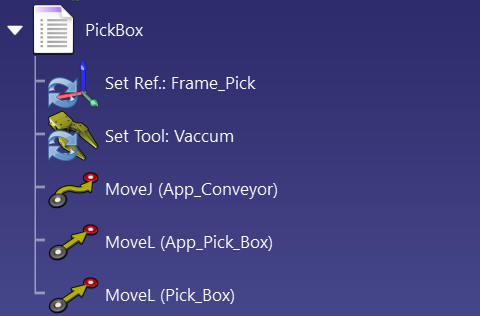
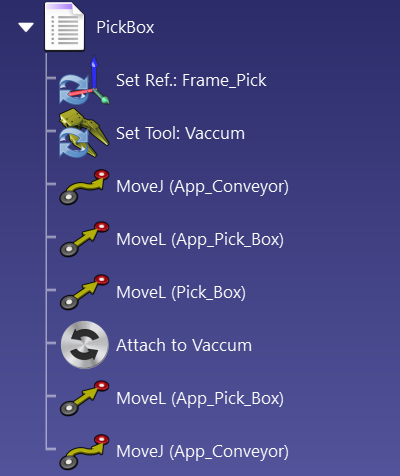
5.Mientras mantiene pulsada la tecla CTRL, haga clic en los 3 objetivos en el orden en que desea que el programa los ejecute y haga clic en "Crear programa". Esto debería añadir automáticamente sus objetivos, la herramienta y el sistema de coordenadas al programa. Cambie el nombre del programa a "PickBox".
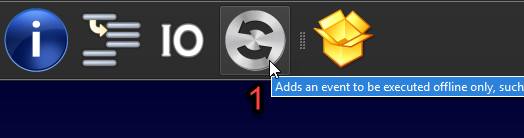
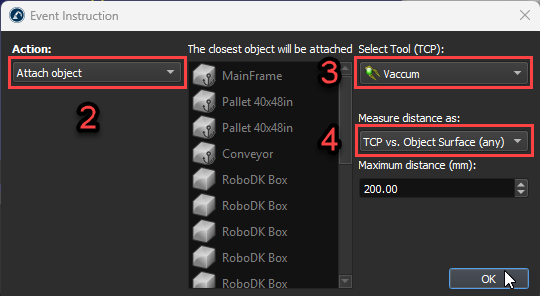
6.Añada un "Evento", seleccione "Adjuntar objeto", asegúrese de que es la herramienta correcta la seleccionada y, a continuación, elija "TCP vs. Superficie del objeto (cualquiera)" en las opciones de distancia de medición. Eso adjuntará la caja a la herramienta. Copie y pegue los objetivos "App_Pick_Box" y "App_Conveyor" siguiendo el evento adjunto. Ahora debería tener un programa de recogida que funcione
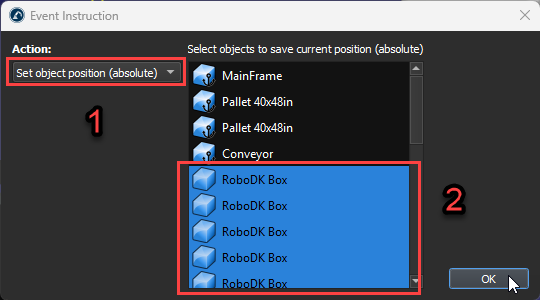
7.Cree un programa vacío, añada un evento, seleccione "Fijar posición del objeto (absoluta)" y seleccione todas sus cajas. Este programa devolverá las cajas a su posición original para que pueda restablecer su estación con un solo clic. Cambie el nombre del programa a "ReemplazarObjetos".
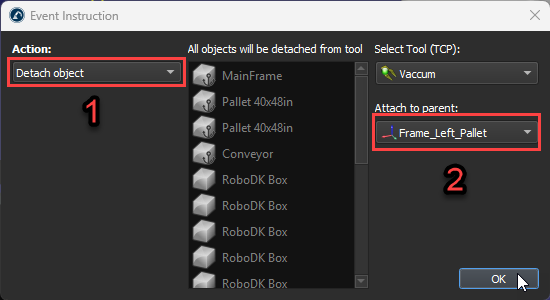
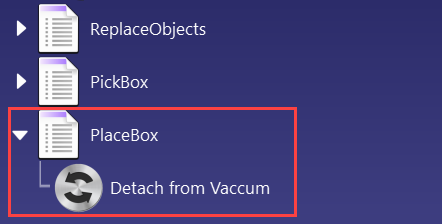
8.Cree otro proyecto vacío, añada un evento, seleccione "Separar objeto" y seleccione el sistema de coordenadas al que desea que se fije la caja tras ser colocada; en nuestro caso, será "Marco_Palet_izquierdo". Cambie el nombre del programa a "PlaceBox".
9.Finalmente, el último requisito que falta es un objetivo que se utilizará como referencia de configuración. Active el sistema de coordenadas de su paleta, mueva su robot sobre ella, asegúrese de que la configuración del robot tiene sentido y, a continuación, cree un objetivo. Cámbiele el nombre a "Ref_Palet".
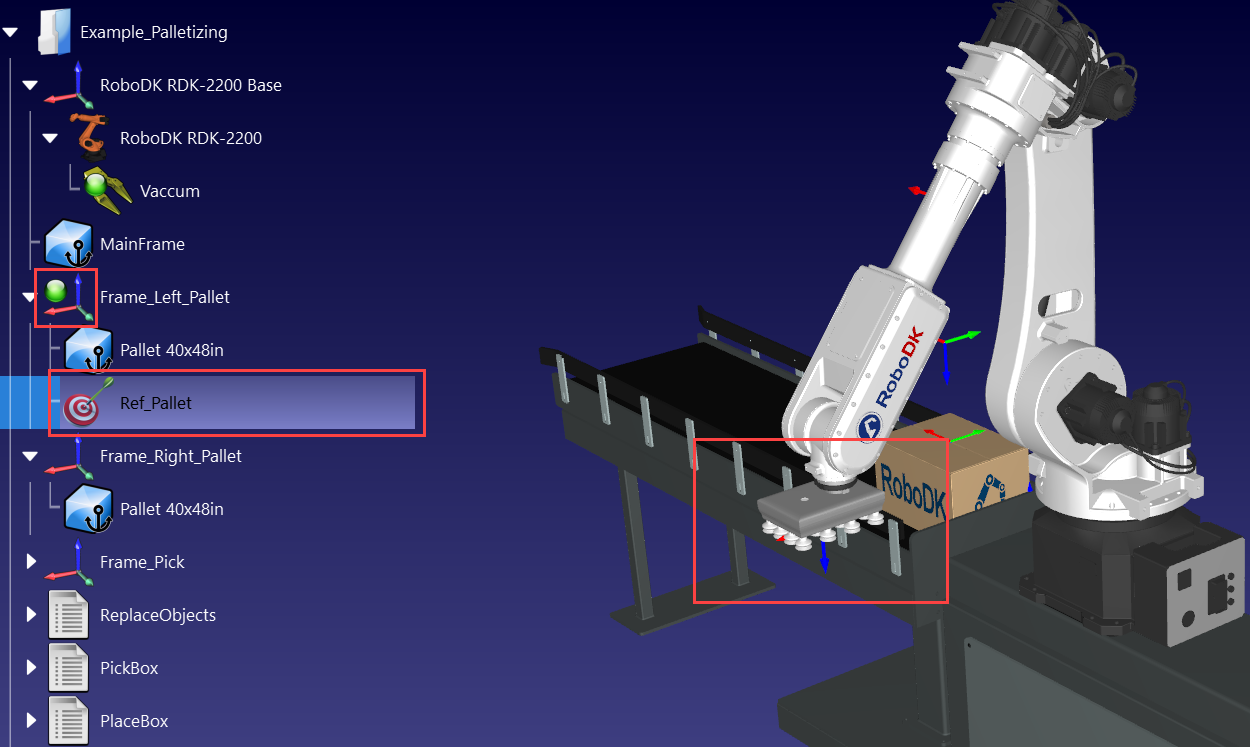
Ahora tiene todo preparado para crear su proyecto de paletizado. Su estación debería tener este aspecto: