Palletizing
Puede realizar una paletización automatizada utilizando el plugin de paletización. El plugin de paletización le ayudará a crear un programa de paletización rápidamente utilizando una interfaz visual e intuitiva.
Este ejemplo le guiará a través de los pasos necesarios para pasar de una estación de paletizado básica a una simulación y, finalmente, a un programa de robot real que podrá cargar y ejecutar en un controlador de robot.
Debe cargar el plugin de paletización en RoboDK para activar las funciones de paletización.
Siga estos pasos para habilitar el plugin de paletización:
1.Seleccione Herramientas➔ Plug-Ins.
2.Haga doble clic en el PluginPalletizing si no está activado.
Debería ver la entrada Paletización en el menú y un nuevo icono Paletización en la barra de herramientas.
Para crear un proyecto de paletizado, primero debe configurar correctamente su estación en RoboDK.
Siga estos pasos: para configurar correctamente su estación:
1. Debe cargar un robot, una herramienta (TCP), un marco de referencia para recoger la caja (Pick_Frame) y un marco de referencia sobre el que construir su paleta (Pallet).
2.También le recomendamos que importe la caja que desea apilar y el palé sobre el que desea hacerlo. Como alternativa, puede encontrar cajas de tamaño estándar en la biblioteca de RoboDK.
3.El palet debe estar alineado con los ejes X+ e Y+ del bastidor de apilado (Palet).

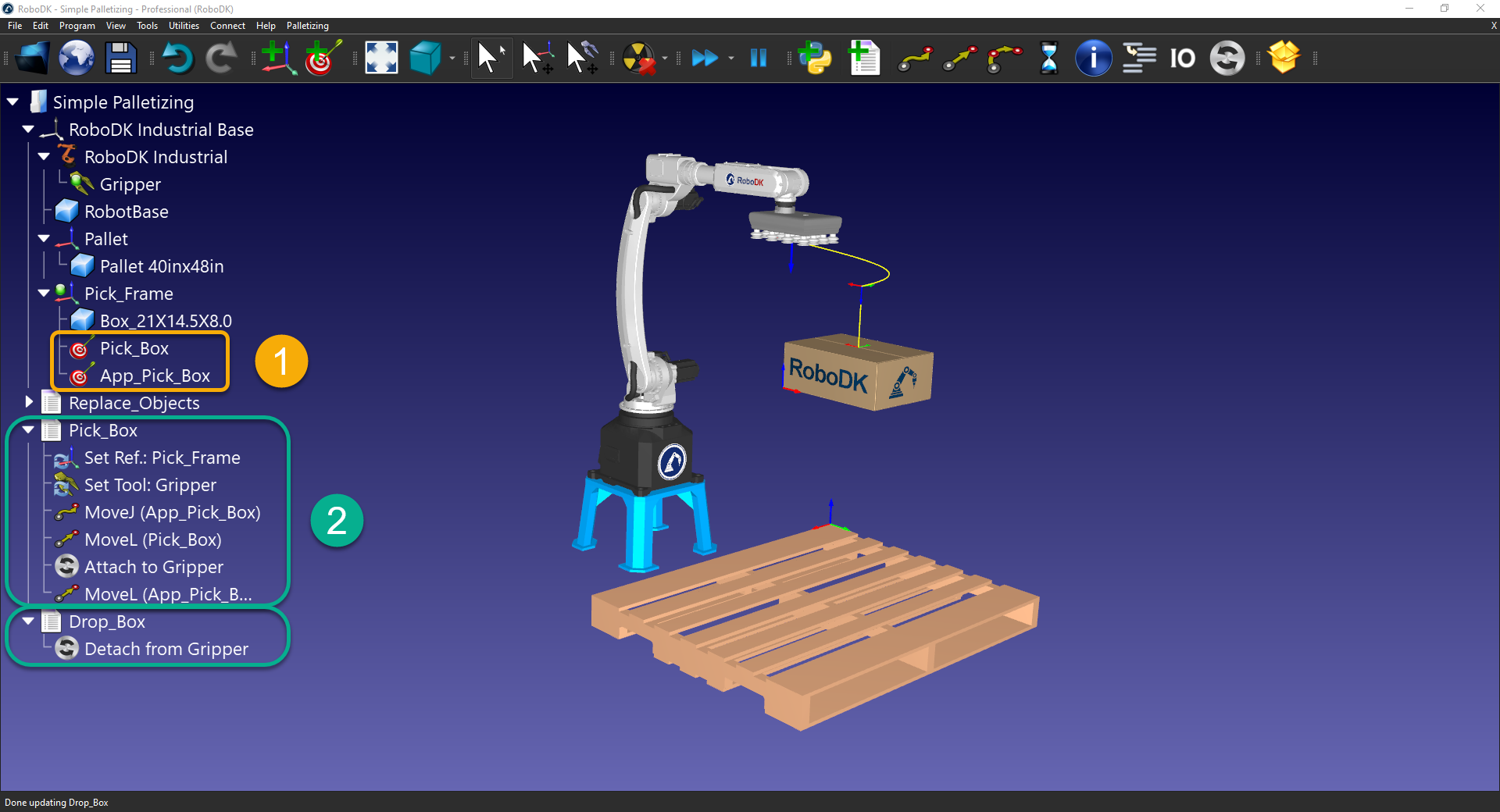
El asistente de paletización requiere que usted proporcione un subprograma para escoger una nueva caja y un programa para soltar la caja. Le recomendamos que los cree primero.
Siga estos pasos para crear un programa de picking (Pick_Box) y un programa de caída (Drop_Box):
1. Cree un objetivo de recogida donde recogerá la nueva caja entrante. También le recomendamos que añada un punto de aproximación.
2. Cree un programa Pick_Box y Drop_Box.