Configuración del Plugin
Seleccione el botón Configuraciones para abrir las configuraciones relacionadas con el plugin RoboDK para BobCAD-CAM.
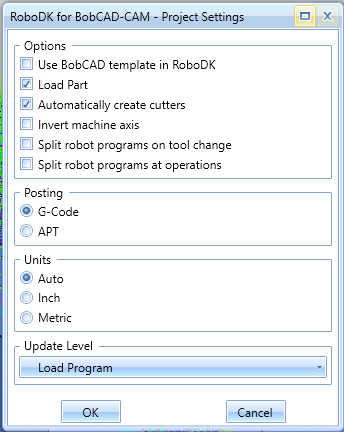
Entre otras cosas, puede modificar las siguientes opciones:
1.Use la plantilla de BobCAD-CAM en lugar de la plantilla de RoboDK (las plantillas de color y navegación 3D en RoboDK coincidirán con el estilo de BobCAD-CAM).
2.Cargue y actualice la pieza en RoboDK cada vez que publique una nueva operación de mecanizado. Solo se cargarán los sólidos y las superficies visibles.
3.Marcar la opción Invertir eje de la herramienta de la máquina, le permite tener en cuenta automáticamente el eje Z de su herramienta que apunta hacia el lado interior de la herramienta (en lugar de apuntar hacia el exterior).
4.Use archivos G-Code en lugar de archivos APT. RoboDK puede leer los siguientes archivos para generar simulaciones y programas de robots:
a.Archivos APT (opción predeterminada): carga archivos APT nativos de BobCAD-CAM en RoboDK. Este es el método preferido para la mayoría de las operaciones.
b.Archivos de código G: genera archivos de mecanizado de código G. Tenga en cuenta que este formato depende del postprocesador que seleccione y está diseñado principalmente para trabajar con trayectorias de mecanizado de 3 ejes.