Configuración automática
La configuración automática
La configuración automática cargará/actualizará el modelo 3D y la trayectoria de la herramienta de mecanizado de su robot en RoboDK.
Si ya tiene una estación RoboDK abierta, utilizará el proyecto RoboDK existente sin anular el robot, la herramienta o el sistema de coordenadas.
Puede cambiar fácilmente el robot, modificar la herramienta y/o el sistema de referencia. A modo de ejemplo, siga estos pasos para cambiar el robot:
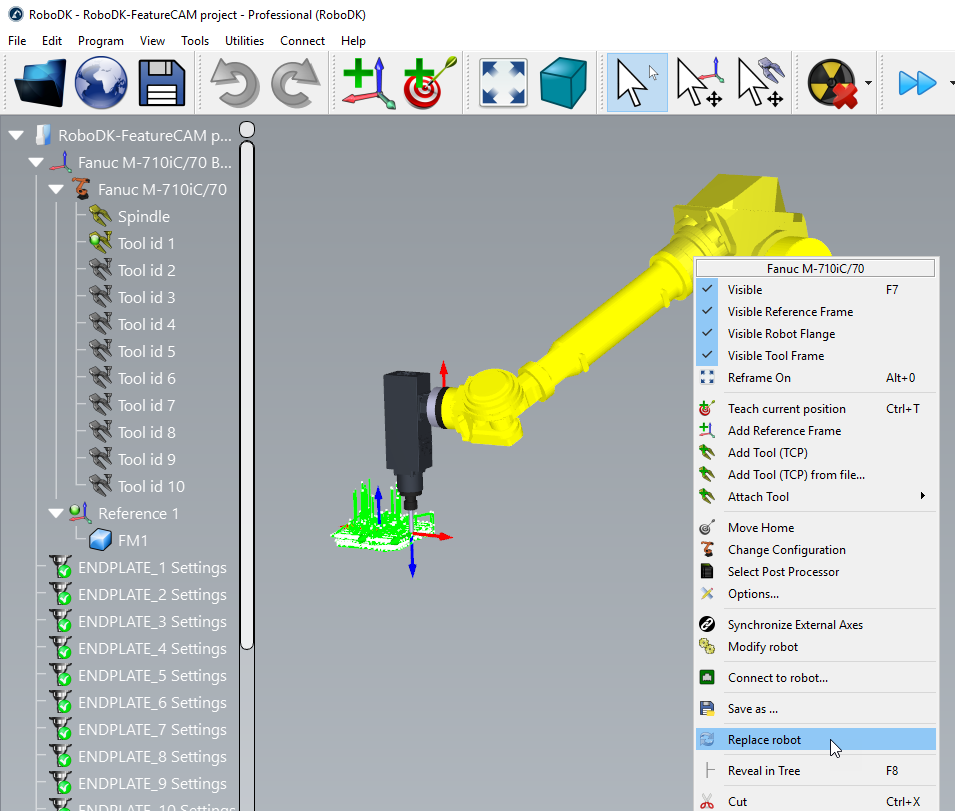
1.Haga clic con el botón derecho en el robot
2.Seleccione Reemplazar robot (como se muestra en la siguiente imagen)
3.Seleccione el robot que le gustaría usar
El instalador de RoboDK sólo proporciona algunos robots de forma predeterminada, sin embargo, es posible descargar más robots de la biblioteca en línea.
Hay más información disponible sobre cómo añadir una herramienta robótica en la sección Primeros pasos.
Guarde el proyecto para conservar los cambios seleccionando Archivo➔Guardar estación (Ctrl+S).
Una vez haya actualizado su celda robótica, seleccione Utilidades➔ Actualizar proyecto de mecanizado de robots para actualizar todos los programas. Se mostrará una marca de verificación verde si los programas son viables con los parámetros actuales de la celda. Si hay algún problema (como singularidades, límites de ejes o problemas de alcance), se mostrará una marca roja.
Haga doble clic en el proyecto de mecanizado de robot 
Haga clic con el botón derecho en un programa y seleccione Ejecutar para simularlo (o haga doble clic en el programa). También puede seleccionar Generar programa de robot (F6) para generar el programa de robot para su controlador de robot. Encontrará más información sobre cómo generar programas de robot en la sección Programación fuera de línea.
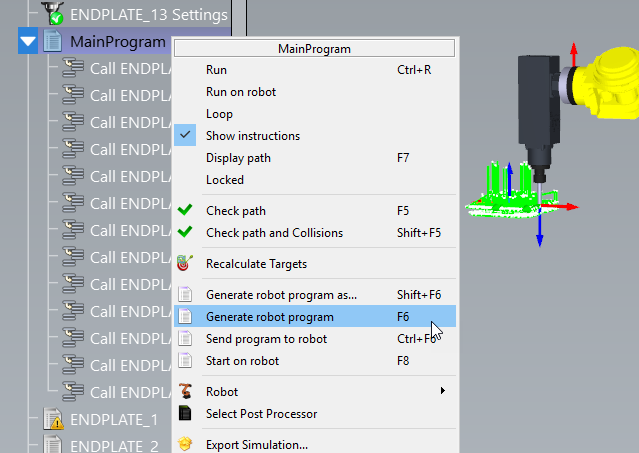
También puede hacer clic con el botón derecho en un programa y seleccionar Seleccionar postprocesador para cambiar el postprocesador. Más información sobre los postprocesadores disponible en la sección de postprocesadores.