Configuración del plugin
Seleccione la macro Configuración para abrir la configuración de FeatureCAM relacionada con RoboDK. Verá la ventana de ajustes que se muestra en la siguiente imagen.
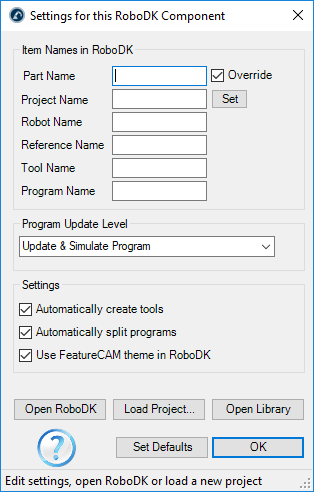
Puede modificar las siguientes opciones:
1.Nombre de la pieza es el nombre del modelo 3D cuando se carga en RoboDK. Déjelo en blanco para usar automáticamente el nombre usado en FeatureCAM.
2.Nombre del proyecto le permite especificar un archivo de proyecto de RoboDK (RDK). Es posible especificar un proyecto RoboDK predeterminado (archivo RDK) para mostrar automáticamente simulaciones o generar programas de robot. Déjelo en blanco para utilizar automáticamente el proyecto actualmente abierto en RoboDK.
3.Crear herramientas automáticamente permite crear automáticamente nuevos TCPs basados en el portaherramientas y la geometría del cortador definida en FeatureCAM. La primera herramienta sostenida por el robot se considera el portaherramientas y los nuevos TCPs se calculan como una compensación del portaherramientas.
4.Los programas de división automática dividirán automáticamente el proyecto completo de mecanizado del robot como subproyectos (operaciones). Creando una operación para cada herramienta.
5.Usar el tema de FeatureCAM en RoboDK hará que la navegación 3D y los colores de fondo en RoboDK coincidan con el estilo de FeatureCAM.
También puede especificar el portaherramientas y el sistema de referencia (datum) para las operaciones de mecanizado de su robot.
Seleccione Cargar proyecto... para obtener una vista previa del proyecto abierto recientemente o crear un nuevo proyecto utilizando la configuración predeterminada.
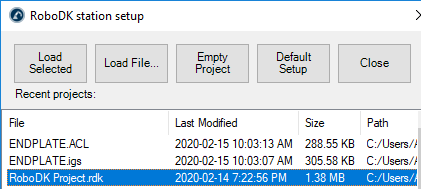
Las siguientes opciones están disponibles:
●Cargar seleccionado: Cargue un proyecto previamente usado en RoboDK (archivo RDK)
●Cargar archivo…: Seleccione un archivo de estación RoboDK (RDK) para abrirlo con RoboDK y utilizarlo como proyecto predeterminado con el proyecto FeatureCAM actual.
●Proyecto vacío: Abra RoboDK con una nueva estación vacía para crear una nueva configuración. Más información para configurar un nuevo proyecto desde cero disponible en la sección Primeros Pasos.
●Cargar pieza: Cargue la pieza desde FeatureCAM a RoboDK (la pieza se guardará como un archivo STL y se cargará automáticamente).
●Configuración predeterminada: Configure una nueva estación con un robot, un husillo y un sistema de referencia predeterminados. La pieza también se exportará automáticamente a RoboDK.
Visite la sección de mecanizado robóticopara obtener más información sobre la creación de una nueva configuración para el mecanizado robótico.