Ajustes
Puede cambiar la configuración predeterminada del plugin de RoboDK seleccionando el botón Ajustes.
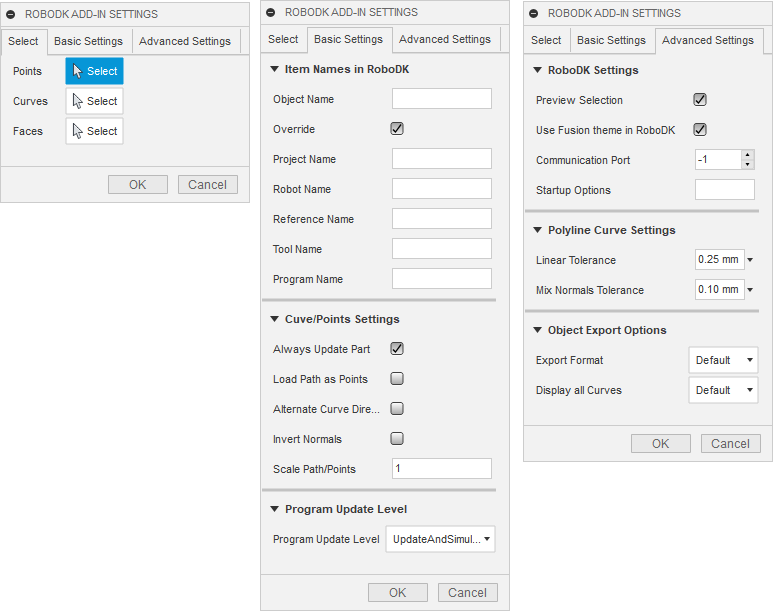
Ajustes básicos:
●Nombre del objeto - establece el nombre del objeto de la curva/puntos que se cargará en RoboDK. Si se deja en blanco, se utilizará el nombre de la pieza o el archivo de ensamblaje.
●Anular - anula el objeto cargado previamente en RoboDK si hay una coincidencia de nombre.
●Nombre del proyecto - establece el nombre/trayectoria del proyecto/estación de RoboDK (archivo .RDK) que se utilizará. Si el archivo ya está cargado, utilizará el proyecto existente. Si el proyecto abierto en RoboDK no coincide con el nombre de archivo, abrirá el proyecto si se especifica la ruta completa.
●Nombre del robot - establece el nombre del robot que se utilizará en RoboDK (si tiene más de 1 robot en su proyecto). El nombre del robot debe coincidir con el nombre visible en el árbol de la estación de RoboDK. Deje este valor vacío (predeterminado) para utilizar el primer o único robot disponible.
●Nombre de referencia - establece el nombre del sistema de referencia para colocar la trayectoria con respecto al robot. El nombre debe coincidir con el nombre visible en el árbol de la estación RoboDK. Si no se proporciona un nombre, se utilizará el sistema 
●Nombre de la herramienta - establece el nombre de la herramienta (TCP) que se utilizará con el robot para seguir la trayectoria. El nombre debe coincidir con el nombre visible en el árbol de la estación RoboDK. Si no se proporciona un nombre, se utilizará 
●Nombre del programa - establece el nombre del archivo del programa que se generará.
●Actualizar siempre la pieza - marque esta opción para actualizar siempre el modelo 3D de Fusión a RoboDK. Esto actualizará la pieza cuando seleccione curvas o puntos.
●Cargar trayectoria como puntos - marque esta opción para convertir una curva en puntos, por lo que se creará un proyecto de seguimiento de puntos en RoboDK. Esto es útil para operaciones de fabricación como la perforación. Desmarque esta opción para cargar la ruta como un proyecto de seguimiento de la curva.
●Alternar direcciones de curvas - marque esta opción para alternar la dirección de movimiento con cada pasada (patrón de Zig-Zag).
●Invertir normales - marque esta opción para invertir las normales de la superficie calculada. Esto cambiará la orientación de la herramienta del robot.
Configuración avanzada:
●Use el tema Fusion 360 en RoboDK - inicia RoboDK con el tema Autodesk Fusion 360. Esto incluye cambiar el comportamiento del ratón para la navegación 3D y el color de fondo. Estos ajustes se pueden cambiar en el menú de RoboDK: Herramientas-Opciones.
●Puerto de comunicación: configura el puerto de comunicación para comunicarse con RoboDK. Se pueden ejecutar varias instancias de RoboDK al mismo tiempo y usar diferentes configuraciones si se usa un puerto diferente. Cuando este valor se establece en -1 (predeterminado), se utiliza el puerto predeterminado (20500).
●Opciones de inicio - establece los argumentos para pasar a RoboDK la primera vez que se inicia. Por ejemplo, para iniciar RoboDK silenciosamente puede establecer '/NOSPLASH /NOSHOW /HIDDEN'. Los programas pueden seguir generándose, aunque no se muestre RoboDK. Más información en la sección Línea de comandos de la API de RoboDK.
●Tolerancia lineal (mm) - establece la precisión lineal para dividir las curvas como un conjunto de puntos.
●Tolerancia de mezcla de normales (mm) - establece la tolerancia de distancia usada para mezclar cálculos normales entre múltiples superficies.
●Formato de exportación - selecciona el formato de exportación para cargar la pieza en RoboDK.
●Mostrar todas las curvas de objetos - muestra las curvas cargadas en RoboDK incluso si no están seleccionadas. Puede cambiar este ajuste en RoboDK (Herramientas-Opciones-Mostrar-Mostrar Curvas).