Plugin de RoboDK para Fusion 360
El plugin RoboDK para Autodesk Fusion 360 le permite combinar las características de modelado CAD/CAM en 3D de Autodesk Fusion 360 con RoboDK para la simulación de robots, el mecanizado robótico y la programación fuera de línea.
Con el plugin RoboDK para Fusion 360, puede cargar fácilmente en RoboDK modelos 3D creados en Fusion 360. Este plugin le permite programar más de 30 fabricantes de robots diferentes y 800 robots directamente desde Autodesk Fusion 360.
Los robots se pueden programar fácilmente como máquinas de 5 ejes para aplicaciones de fabricación como taladrado, soldadura, recorte, impresión 3D o mecanizado robótico. Más información disponible en la sección de mecanizado robótico.
La sección de postprocesadores de robots muestra una lista de las marcas de robots y controladores de robots compatibles con RoboDK. También es posible modificar o crear nuevos postprocesadores para personalizar la generación de programas.
El plugin de RoboDK para Fusión es gratuito si tiene una licencia de RoboDK.
Instalar
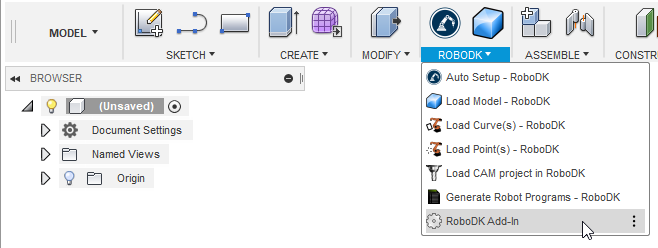
Si ya ha instalado Autodesk Fusion 360 y RoboDK, es posible que ya tenga el plugin de RoboDK para Fusion instalado y listo. El plugin RoboDK para Fusion 360 debería estar visible en la barra de herramientas.
Barra de herramientas Fusion 360
La barra de herramientas predeterminada de RoboDK para Autodesk Fusion 360 incluye una barra de herramientas dedicada para RoboDK con 7 comandos para propósitos de CAD y CAM.
●
●
●
●
●
●
●
La principal diferencia entre Configuración automática y Cargar Curva(s) o Punto(s) es que la Configuración automática carga la pieza y crea un nuevo proyecto de seguimiento de curva/punto. El uso de Cargar Curva(s) o Punto(s) es más rápido y sólo actualizará las características geométricas existente en el RoboDK, manteniendo la configuración definida previamente.
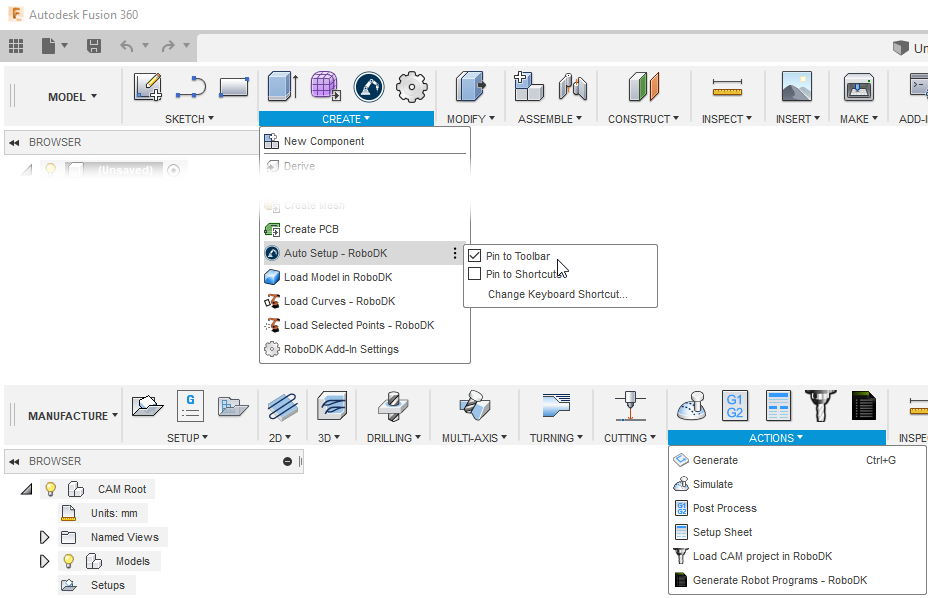
También encontrará 5 comandos en la pestaña CREAR del espacio de trabajo MODELO (características CAD) y 2 comandos en la pestaña ACCIONES del espacio de trabajo FABRICACIÓN (características CAM).
Ajustes
Puede cambiar la configuración predeterminada del plugin de RoboDK seleccionando el botón Ajustes.
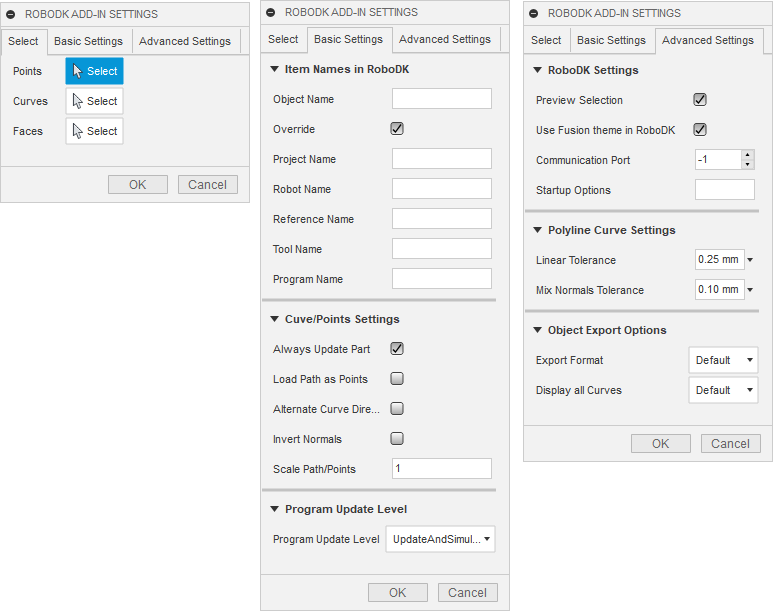
Ajustes básicos:
●Nombre del objeto - establece el nombre del objeto de la curva/puntos que se cargará en RoboDK. Si se deja en blanco, se utilizará el nombre de la pieza o el archivo de ensamblaje.
●Anular - anula el objeto cargado previamente en RoboDK si hay una coincidencia de nombre.
●Nombre del proyecto - establece el nombre/trayectoria del proyecto/estación de RoboDK (archivo .RDK) que se utilizará. Si el archivo ya está cargado, utilizará el proyecto existente. Si el proyecto abierto en RoboDK no coincide con el nombre de archivo, abrirá el proyecto si se especifica la ruta completa.
●Nombre del robot - establece el nombre del robot que se utilizará en RoboDK (si tiene más de 1 robot en su proyecto). El nombre del robot debe coincidir con el nombre visible en el árbol de la estación de RoboDK. Deje este valor vacío (predeterminado) para utilizar el primer o único robot disponible.
●Nombre de referencia - establece el nombre del sistema de referencia para colocar la trayectoria con respecto al robot. El nombre debe coincidir con el nombre visible en el árbol de la estación RoboDK. Si no se proporciona un nombre, se utilizará el sistema 
●Nombre de la herramienta - establece el nombre de la herramienta (TCP) que se utilizará con el robot para seguir la trayectoria. El nombre debe coincidir con el nombre visible en el árbol de la estación RoboDK. Si no se proporciona un nombre, se utilizará 
●Nombre del programa - establece el nombre del archivo del programa que se generará.
●Actualizar siempre la pieza - marque esta opción para actualizar siempre el modelo 3D de Fusión a RoboDK. Esto actualizará la pieza cuando seleccione curvas o puntos.
●Cargar trayectoria como puntos - marque esta opción para convertir una curva en puntos, por lo que se creará un proyecto de seguimiento de puntos en RoboDK. Esto es útil para operaciones de fabricación como la perforación. Desmarque esta opción para cargar la ruta como un proyecto de seguimiento de la curva.
●Alternar direcciones de curvas - marque esta opción para alternar la dirección de movimiento con cada pasada (patrón de Zig-Zag).
●Invertir normales - marque esta opción para invertir las normales de la superficie calculada. Esto cambiará la orientación de la herramienta del robot.
Configuración avanzada:
●Use el tema Fusion 360 en RoboDK - inicia RoboDK con el tema Autodesk Fusion 360. Esto incluye cambiar el comportamiento del ratón para la navegación 3D y el color de fondo. Estos ajustes se pueden cambiar en el menú de RoboDK: Herramientas-Opciones.
●Puerto de comunicación: configura el puerto de comunicación para comunicarse con RoboDK. Se pueden ejecutar varias instancias de RoboDK al mismo tiempo y usar diferentes configuraciones si se usa un puerto diferente. Cuando este valor se establece en -1 (predeterminado), se utiliza el puerto predeterminado (20500).
●Opciones de inicio - establece los argumentos para pasar a RoboDK la primera vez que se inicia. Por ejemplo, para iniciar RoboDK silenciosamente puede establecer '/NOSPLASH /NOSHOW /HIDDEN'. Los programas pueden seguir generándose, aunque no se muestre RoboDK. Más información en la sección Línea de comandos de la API de RoboDK.
●Tolerancia lineal (mm) - establece la precisión lineal para dividir las curvas como un conjunto de puntos.
●Tolerancia de mezcla de normales (mm) - establece la tolerancia de distancia usada para mezclar cálculos normales entre múltiples superficies.
●Formato de exportación - selecciona el formato de exportación para cargar la pieza en RoboDK.
●Mostrar todas las curvas de objetos - muestra las curvas cargadas en RoboDK incluso si no están seleccionadas. Puede cambiar este ajuste en RoboDK (Herramientas-Opciones-Mostrar-Mostrar Curvas).
Ejemplos
Esta sección muestra ejemplos básicos que combinan proyectos de Autodesk Fusion 360 con RoboDK para la simulación de robots y la programación fuera de línea.
Corte por láser
El siguiente ejemplo muestra cómo puede programar un robot industrial para una aplicación de corte por láser.
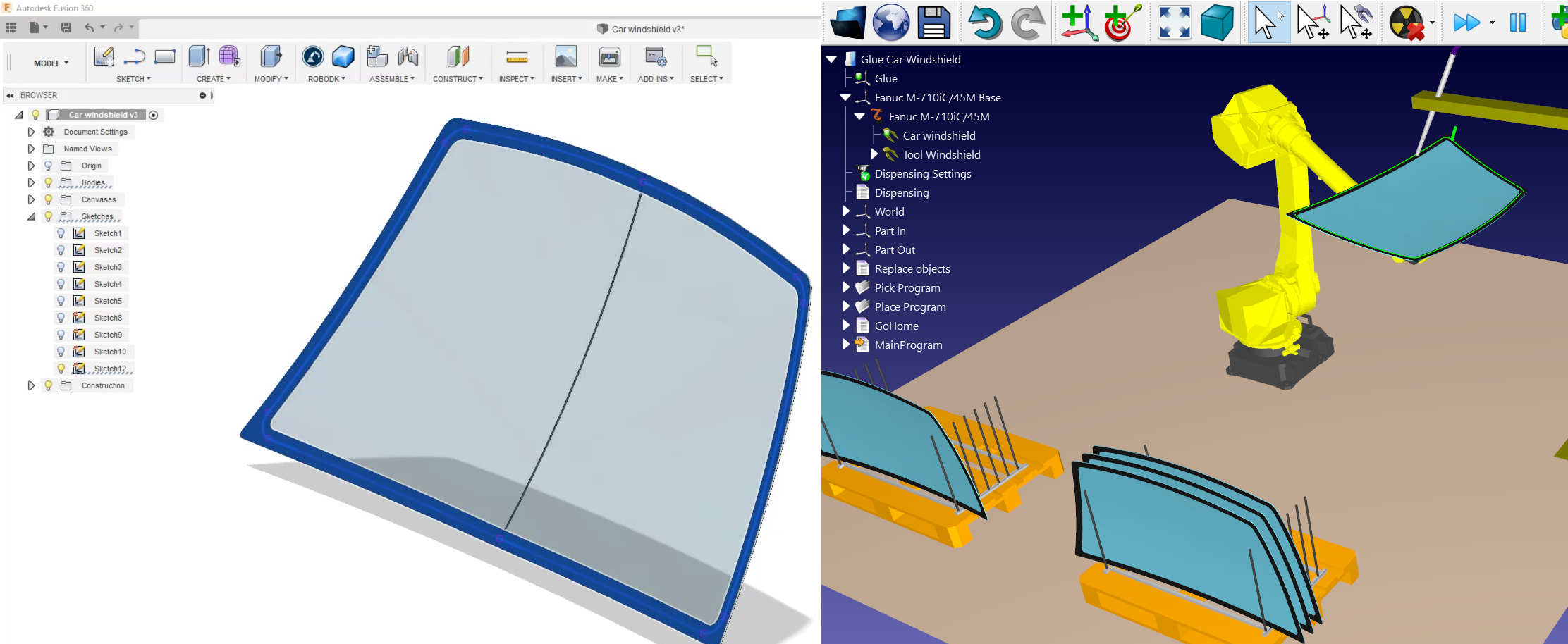
Dispensación de Pegamento
El siguiente ejemplo muestra cómo puede crear una simulación de robot y programar una aplicación de dispensado de pegamento. En este ejemplo, el robot sujeta la pieza y la herramienta está estática. Este tipo de configuración también se denomina TCP remoto.
Desbarbado robótico
El siguiente ejemplo muestra cómo puede programar un robot para una aplicación de desbarbado. Este ejemplo requiere el uso del banco de trabajo de fabricación de Fusion (CAM/herramientas de mecanizado) y le ayudará a utilizar Fusion y RoboDK para aplicaciones de mecanizado robótico.
Instalación manual
Estos son los pasos manuales para configurar el plugin RoboDK para Autodesk Fusion 360. Debe seguir estos pasos si el plugin de RoboDK para Fusion no se instaló automáticamente de forma predeterminada con el instalador de RoboDK:
1.Instale Autodesk Fusion (si aún no lo ha hecho).
2.Descargue e instale RoboDK.
3.Descargue el plugin RoboDK para Autodesk Fusion 360.
4.Descomprima el contenido en C:\RoboDK\Other\Plugin-Fusion360\RoboDK
Instale el plugin RoboDK en Fusion 360:
5.Abra Autodesk Fusion 360.
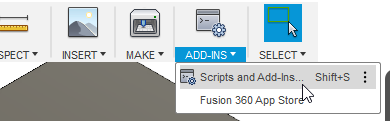
6.Seleccione ADD-INS-Scripts y Add-Ins (Shift+S), desde el espacio de trabajo MODELO.
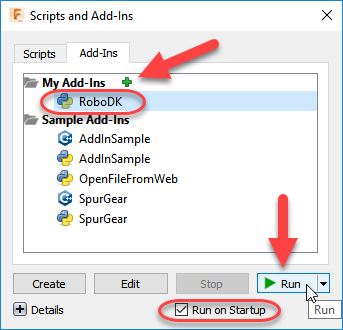
7.Seleccione la pestaña de Plugins
8.Seleccione el botón verde +
9.Introduzca la siguiente ruta:
C:\RoboDK\Otro\Plugin-Fusion360\RoboDK
10.Marque la opción Ejecutar al iniciar para iniciar Fusion 360 con el plugin RoboDK
11.Seleccione Ejecutar
Entonces debería ver una barra de herramientas llamada RoboDK en el espacio de trabajo de MODELO.
Además, todos los comandos relacionados con CAD en la barra de herramientas CREAR (del espacio de trabajo MODELO) y todos los comandos relacionados con CAM en la barra de herramientas ACCIONES (del espacio de trabajo FABRICACIÓN).