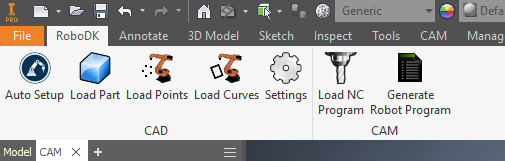
La barra de herramientas predeterminada de RoboDK incluye 7 comandos para propósitos de CAD y CAM:
● Configuración Automática – Este botón le permite seleccionar cualquier geometría (curvas o puntos) y cargarla en RoboDK junto con el modelo 3D.
●Cargar Pieza– Cargue el modelo 3D de Inventor a RoboDK. Las características como curvas o puntos no se cargarán.
●Cargar Punto(s) – Cargue todos los puntos seleccionados en RoboDK como un nuevo objeto. Todas las superficies seleccionadas se utilizarán para calcular puntos normales. Estas normales son importantes ya que definirán el eje de aproximación del robot
●Cargar Curva(s) – Cargue todas las curvas seleccionadas en RoboDK como un elemento nuevo. Todas las superficies seleccionadas se utilizarán para calcular las curvas normales. Estas normales son importantes ya que definirán el eje de aproximación del robot.
●Configuraciones – Abra la ventana Configuración predeterminada.
●Cargar Programa NC– Cargue el proyecto de mecanizado en RoboDK. Si se utilizan varias herramientas para mecanizar, RoboDK dividirá el programa para tener una configuración de proyecto para cada herramienta. Este comportamiento se puede modificar en Herramientas-Opciones-CAM.
●Generar Programa de Robot – Genera todos los programas disponibles en el Proyecto RoboDK.
La principal diferencia entre Configuración automática y Cargar curva(s) o CargarPunto(s) es que la Configuración automática carga la pieza y crea un nuevo proyecto de seguimiento de curva/punto. El uso de Cargar Curva(s) o Cargar Punto(s) es más rápido y solo actualizará las características geométricas existentes en RoboDK, manteniendo la configuración definida previamente.
Consejo: si utiliza la configuración predeterminada, si desea cargar más de un objeto de Inventor, debe cambiar el nombre de los objetos una vez que se hayan cargado en RoboDK.