Configuración del plugin
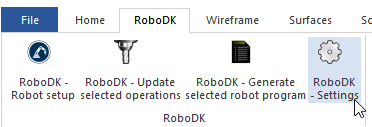
Seleccione Configuración RoboDK
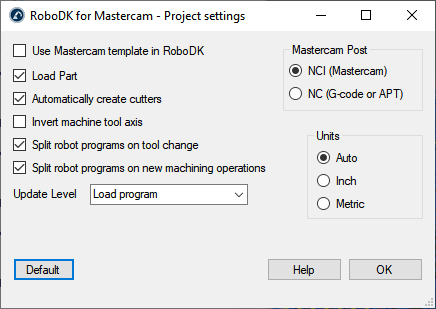
Entre otras cosas, puede modificar las siguientes opciones:
1.Utiliza la plantilla de Mastercam en lugar de la de RoboDK (las plantillas de navegación 3D y de color de RoboDK coincidirán con el estilo de Mastercam). En RoboDK, asegúrese de deseleccionar Ignorar cambios de configuración de aplicaciones de terceros en el menú Herramientas➔Opciones➔Otro para permitir esta plantilla en RoboDK.
2.Cargue y actualice la pieza en RoboDK cada vez que genere una nueva operación de mecanizado. Sólo se cargarán y superficies visibles.
3.Cree automáticamente cortadores de herramientas. En este caso, las nuevas herramientas se crearán automáticamente con respecto a la primera herramienta del robot (portaherramientas) y el TCP se compensará con la longitud total de la herramienta con respecto al portaherramientas.
4.La opción Invertir el eje de la Máquina-Herramienta le permite tener en cuenta automáticamente el eje Z de su herramienta apuntando hacia el interior de la misma (en lugar de apuntar hacia el exterior).
5.Utilice archivos NC (como APT o código G) en lugar de archivos NCI. RoboDK puede leer los siguientes archivos para generar simulaciones y programas de robot:
a.Archivos NCI (opción predeterminada): carga la ruta de herramienta nativa de Mastercam en RoboDK. Este es el método preferido para la mayoría de las operaciones.
b.Archivos NC (archivos de código G). Le permite cargar ciclos de perforación enlatados (a mano) usando la definición de máquina RoboDK.