RoboDK Add-In for Mastercam
Este ejemplo muestra cómo crear un proyecto de mecanizado de robot de 3 ejes utilizando el plugin Mastercam.
1.Cargue la pieza en Mastercam.
2.Cree la trayectoria usando las herramientas de Mastercam Mill.

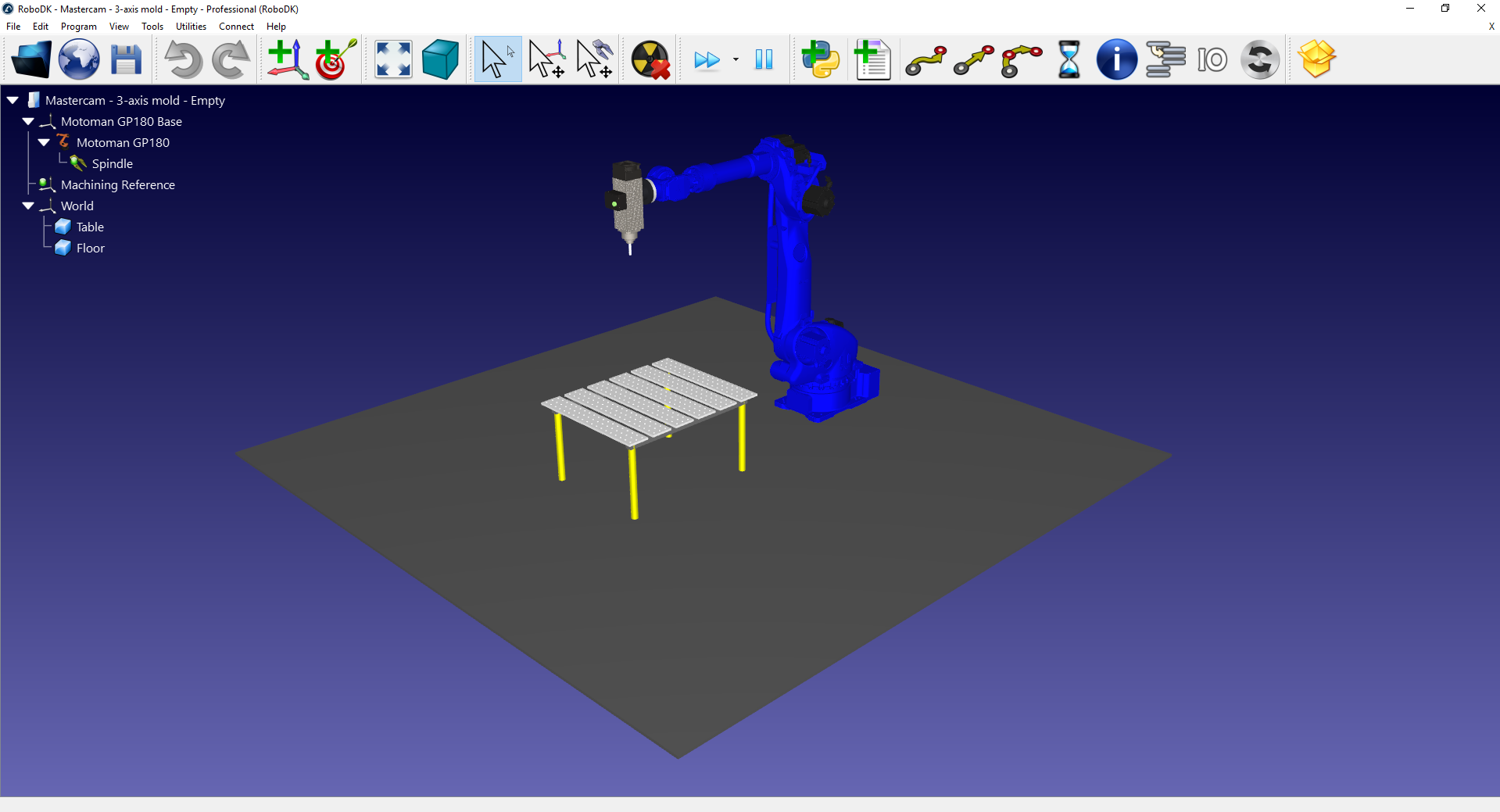
3.Cree una estación en RoboDK con su robot, su husillo y cualquier otro objeto necesario.
4.En la pestaña del plugin de RoboDK, seleccione RoboDK➔Configuración de robot.
5.En la ventana Configuración de mecanizado de robots, seleccione Cargar pieza.

6.En RoboDK, ajuste la posición de sistema de referencia de mecanizado si es necesario. Mantenga presionada la tecla Alt y mueva la referencia con sus flechas usando el cursor para reposicionar la pieza frente al robot.

7.En la pestaña del plugin de RoboDK, seleccione RoboDK ➔Actualizar operaciones seleccionadas.

8.En RoboDK, seleccione Actualizar y Simular en la ventana del Proyecto de Mecanizado de Robots.

9.Modifique la orientación de la herramienta a lo largo de la ruta si es necesario. Mantenga presionada la tecla Alt y oriente la herramienta alrededor de las flechas del eje Z usando el cursor. Seleccione el botón Mostrar para establecer la pose deseada para la ruta. Seleccione Actualizar para volver a calcular la ruta usando esta nueva pose. Seleccione Simular para simular la ruta modificada.
