Configuración
Cada componente de Grasshopper tiene configuraciones específicas que se pueden personalizar. También es posible cambiar la configuración predeterminada que se aplica a los comandos de RoboDK (o botones de la barra de herramientas) seleccionando el botón Configuración.
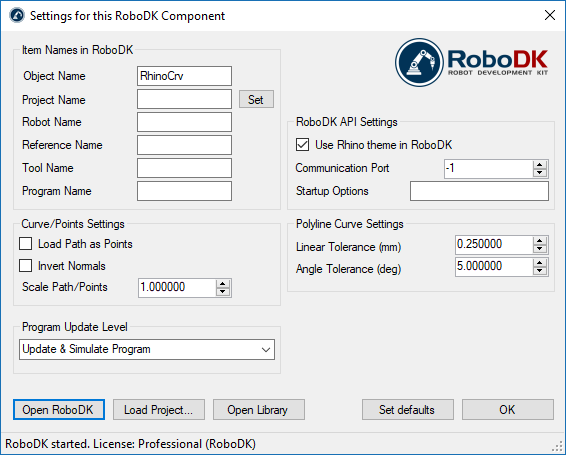
●Nombre del objeto – establezca el nombre del objeto de curva/puntos que se cargará en RoboDK. El objeto en RoboDK se anula cada vez que se vuelve a calcular la ruta. Este valor se ignora si el nombre del objeto se proporciona como una entrada de componente (O).
●Nombre del proyecto – establezca el nombre/trayectoria del proyecto/estación de RoboDK (archivo .RDK) que se utilizará. Si el archivo ya está cargado, utilizará el proyecto existente. Si el proyecto abierto en RoboDK no coincide con el nombre del archivo, abrirá el proyecto si se especifica la trayectoria completa.
●Nombre del robot – establezca el nombre del objeto del robot que se cargará en RoboDK. El nombre del robot debe coincidir con el nombre visible en el árbol de estaciones de RoboDK. Deje este valor vacío (predeterminado) para usar el primer robot disponible.
●Nombre de referencia – establezca el nombre del sistema de referencia para colocar la trayectoria con respecto al robot. El nombre debe coincidir con el nombre visible en el árbol de estaciones de RoboDK.
●Nombre de la herramienta – establezca el nombre de la herramienta (TCP) para usar con el robot para seguir la trayectoria. El nombre debe coincidir con el nombre visible en el árbol de estaciones de RoboDK.
●Nombre del programa– establezca el nombre o la trayectoria del programa a generar.
●Cargar ruta como Puntos – marque esta opción para crear el objeto como puntos y un proyecto de seguimiento de puntos en RoboDK. Esto es útil para operaciones de fabricación como la perforación. Desmarque esta opción para cargar la ruta como un proyecto de seguimiento de curva.
●Invertir Normales – marque esta opción para invertir las normales de superficie calculadas. Esto cambiará la orientación de la herramienta del robot.
●Utilice el tema de Rhino en RoboDK – inicie RoboDK con un tema de Rhino. Esto incluye cambiar el comportamiento del mouse para la navegación 3D y el color de fondo. Esta configuración se aplica solo cuando RoboDK se inicia con Rhino. Estos ajustes se pueden cambiar en el menú Herramientas-Opciones de RoboDK.
●Puerto de Comunicación – configure el puerto de comunicación para comunicarse con RoboDK. Se pueden ejecutar varias instancias de RoboDK al mismo tiempo y usar diferentes configuraciones si se usa un puerto diferente. Cuando este valor se establece en -1 (predeterminado), se utiliza el puerto predeterminado (20500).
●Opciones de inicio– establece los argumentos ara pasar a RoboDK la primera vez que se inicia. Por ejemplo, para iniciar RoboDK en silencio, puede configurar '/NOSPLASH /NOSHOW /HIDDEN'. os programas aún se pueden generar incluso si RoboDK no se muestra. Más información en la sección Línea de comandos de la API de RoboDK.
●Tolerancia lineal (mm) – establece la precisión lineal para dividir curvas como un conjunto de puntos.
●Angle Tolerance (mm) – establece la precisión angular para dividir curvas como un conjunto de puntos.
Botones:
●Abrir RoboDK – abre un proyecto en RoboDK... Se abrirá una nueva ventana con opciones adicionales.
●Cargar Proyecto … – cargue el proyecto RoboDK (archivo RDK) con el que desea utilizar este componente.");
●Abrir Biblioteca – abra la Biblioteca en línea de RoboDK.
●Establecer valores predeterminados– establezca la configuración predeterminada para el componente.
●Aceptar – aplica esta configuración y cierra esta ventana. Si no selecciona Aceptar, no se aplicará ninguna configuración que haya modificado.