Ejemplos
Esta sección muestra ejemplos básicos para cargar un proyecto de SolidWorks en RoboDK para fines de simulación de robots y programación fuera de línea.
Soldadura Robot
El siguiente ejemplo muestra cómo puede crear una ruta de herramienta simple para soldadura robótica desde SolidWorks.
Dispensación de líquidos
El siguiente ejemplo muestra cómo puede programar un robot para una aplicación de dispensación de líquidos utilizando SolidWorks y RoboDK.
Ejemplo de hélice
Este ejemplo muestra cómo cargar una estación RoboDK de muestra (configuración predeterminada) y seguir un conjunto de curvas definidas en SolidWorks con el robot.
1.Cargue el ejemplo de hélices de 3 palas en SolidWorks.
2.Seleccione la pestaña RoboDK y seleccione Configuración
3.Seleccione Cargar Proyecto...
4.Seleccione Configuración predeterminada. RoboDK iniciará y cargará un proyecto de muestra con un robot KUKA, una herramienta (un husillo como Herramienta 1) y un sistema de referencia (Referencia 1).
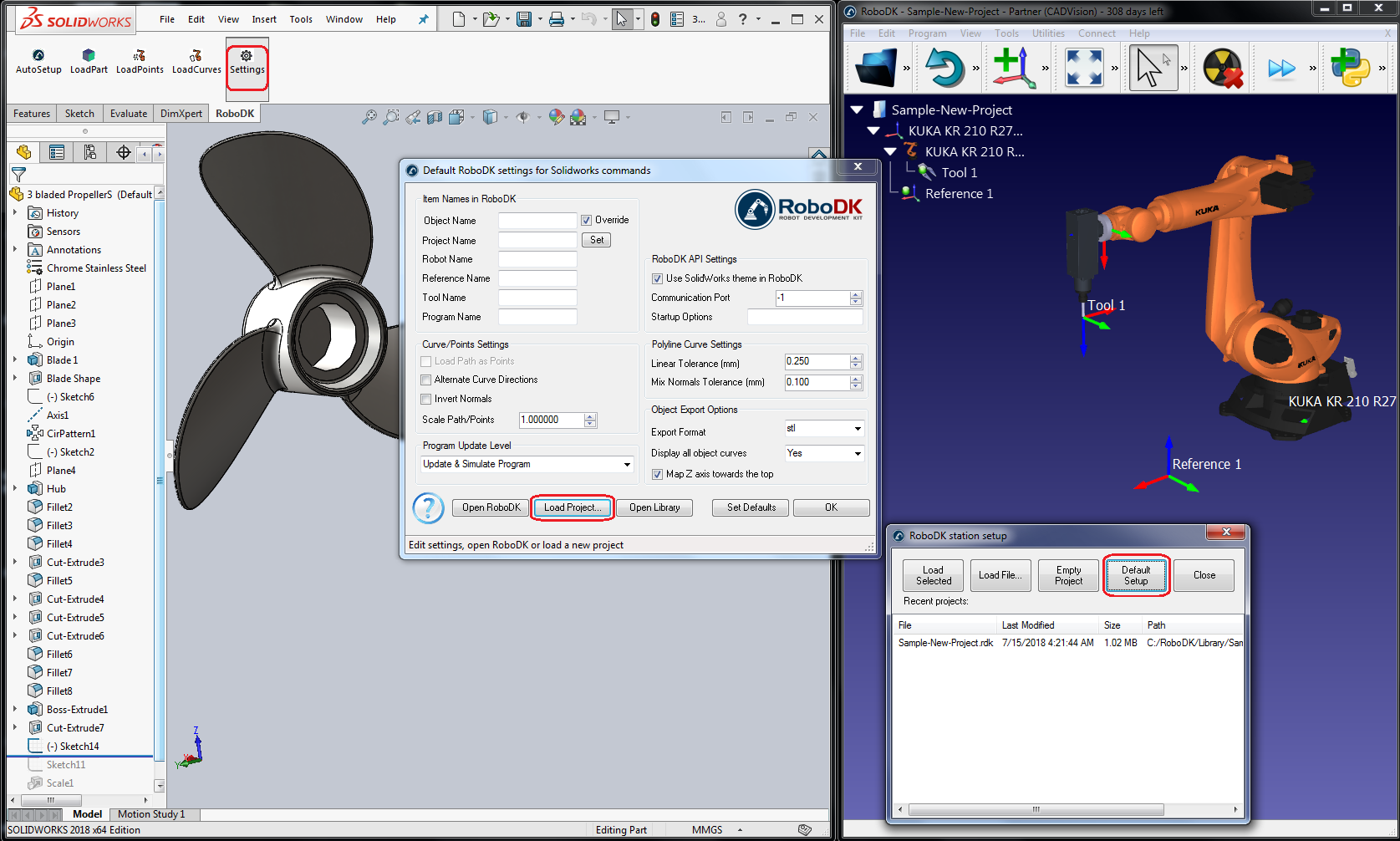
5.Cierre la ventana de Configuración o seleccione aceptar.
6.Seleccione el botón 
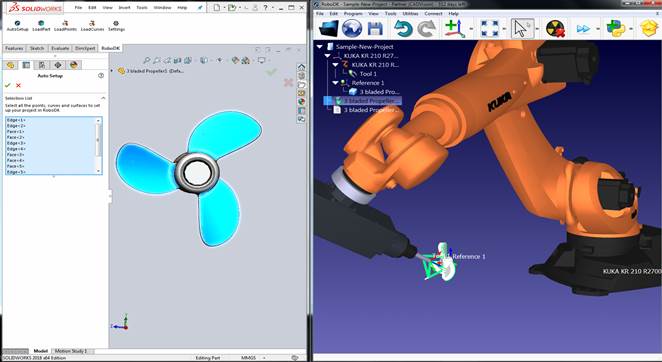
7.Seleccione todas las curvas y superficies y pulse aceptar en la página del administrador de propiedades. El proyecto se cargará en RoboDK como se muestra en la siguiente imagen.
Debería ver la pieza cargada en el sistema de referencia activo (Referencia 1) y un nuevo proyecto de seguimiento de la curva en RoboDK que sigue la ruta de la herramienta.
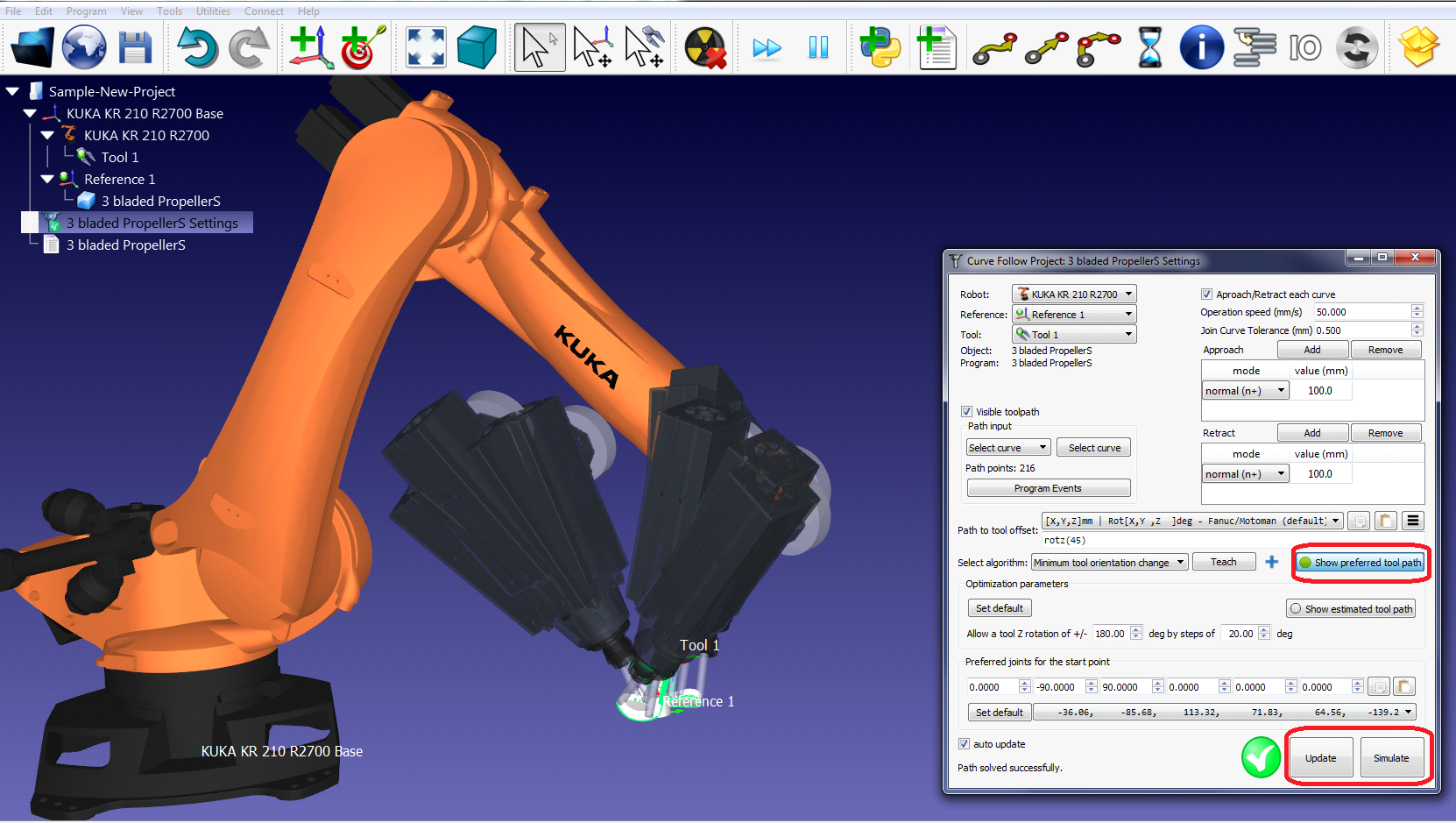
Puede ver que el movimiento de aproximación es normal en la ruta de la herramienta. El robot debería ser capaz de moverse a lo largo de la trayectoria de la herramienta sin problemas.
Haga doble clic en los ajustes de la hélice de
Por ejemplo, puede seleccionar Mostrar ruta de herramienta preferida para ver y modificar la orientación predeterminada de la herramienta con respecto a la pieza. Cambie el valor de compensación de ruta a herramienta para definir una rotación adicional. Para ello, puede introducir un nuevo valor o simplemente utilizar la rueda del ratón para ver una vista previa rápida del resultado.
Más información para cambiar estos ajustes en la sección de mecanizado de robots.
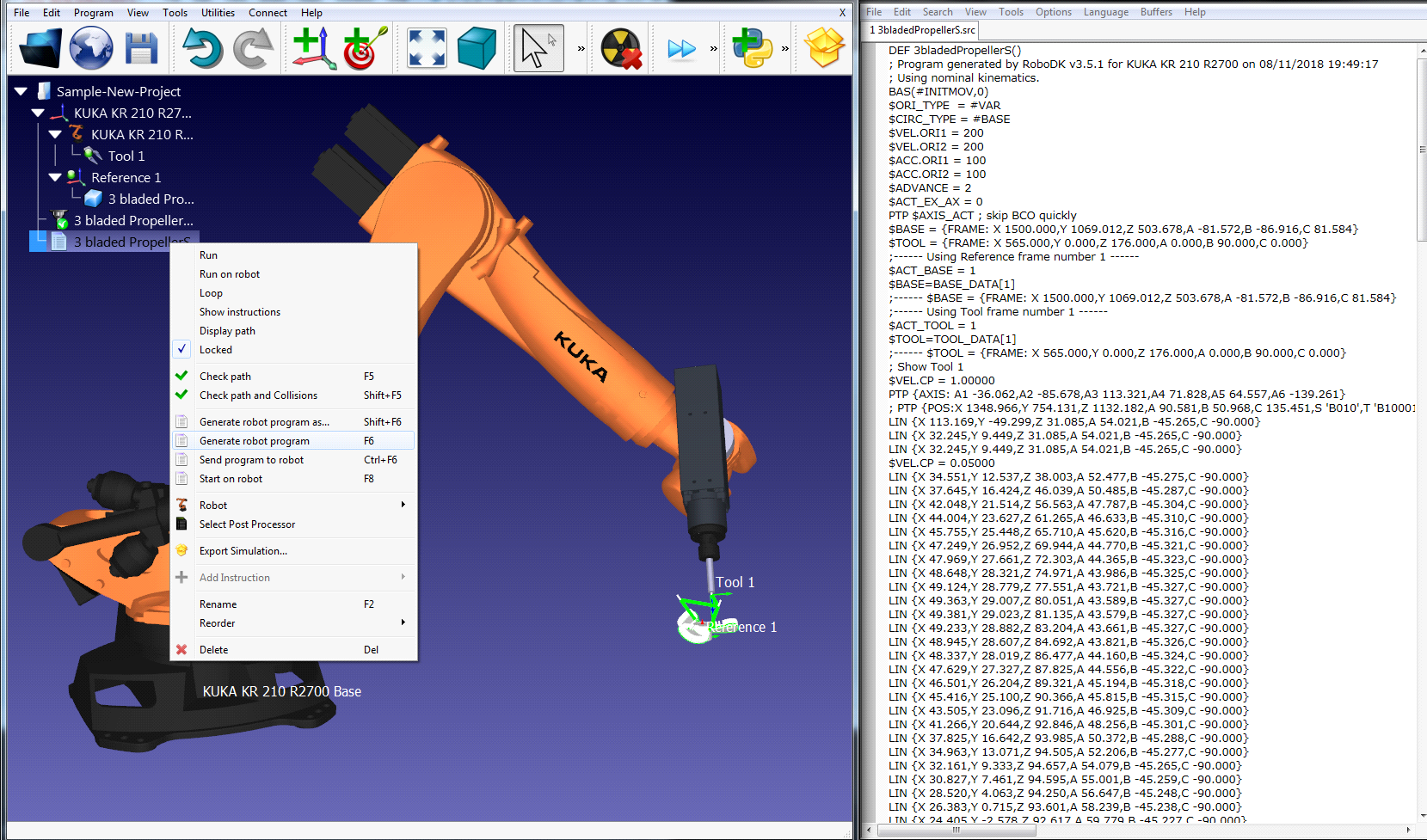
Finalmente, cuando la simulación produce el resultado deseado, puede generar el programa o exportar la simulación:
8.Haga clic con el botón derecho del ratón en el programa
9.Seleccione Generar programa de robot (F6). El programa de robot se generará y se mostrará.