hyperMILL Introducción
El plugin RoboDK para OpenMind hyperMILL le permite configurar rápidamente proyectos de mecanizado robótico directamente desde hyperMILL. Con la integración de RoboDK para el software OpenMind, puede combinar fácilmente el software de mecanizado CAD/CAM hyperMILL con RoboDK para simular y programar brazos robóticos industriales para el mecanizado robótico.
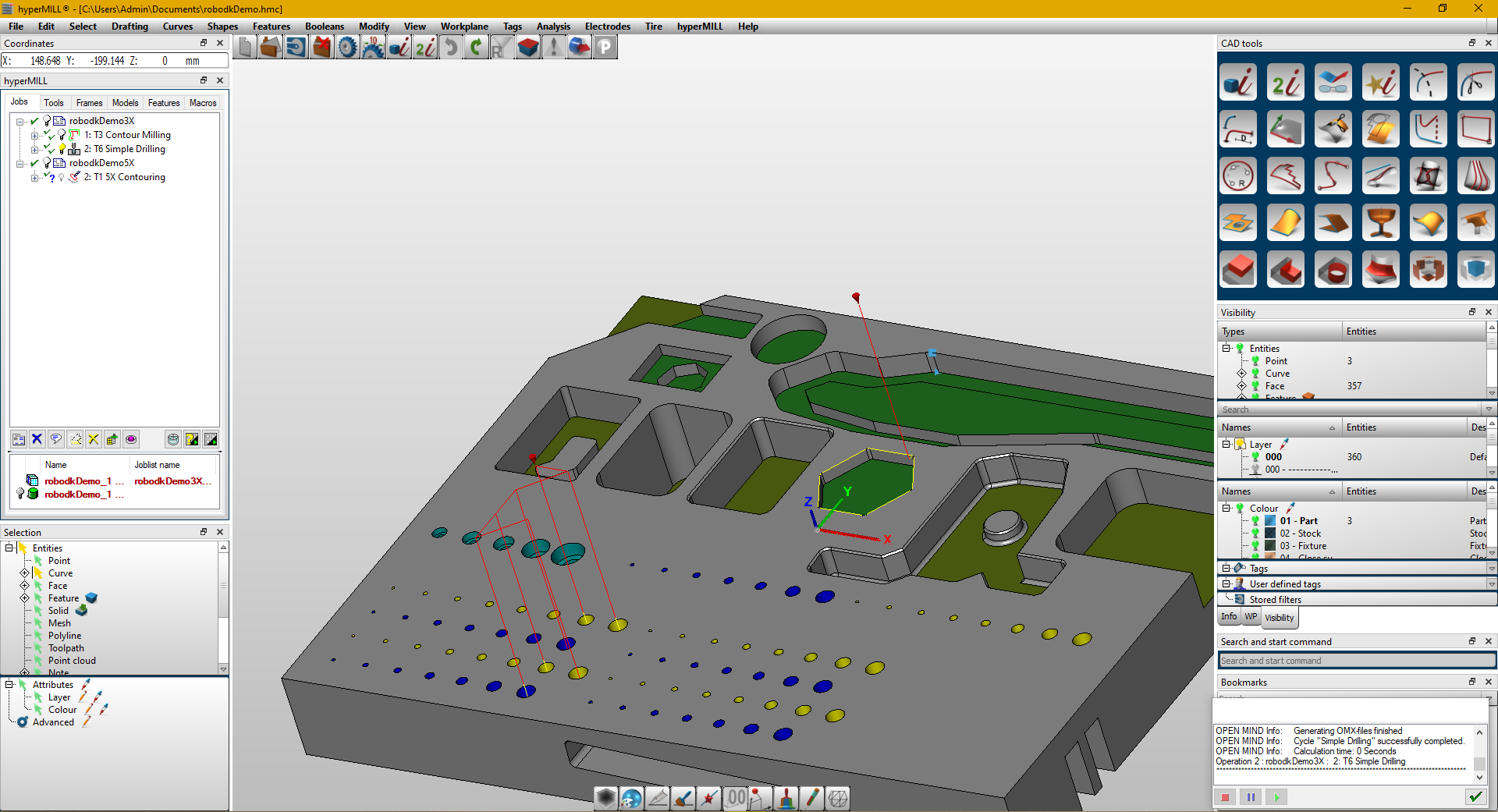
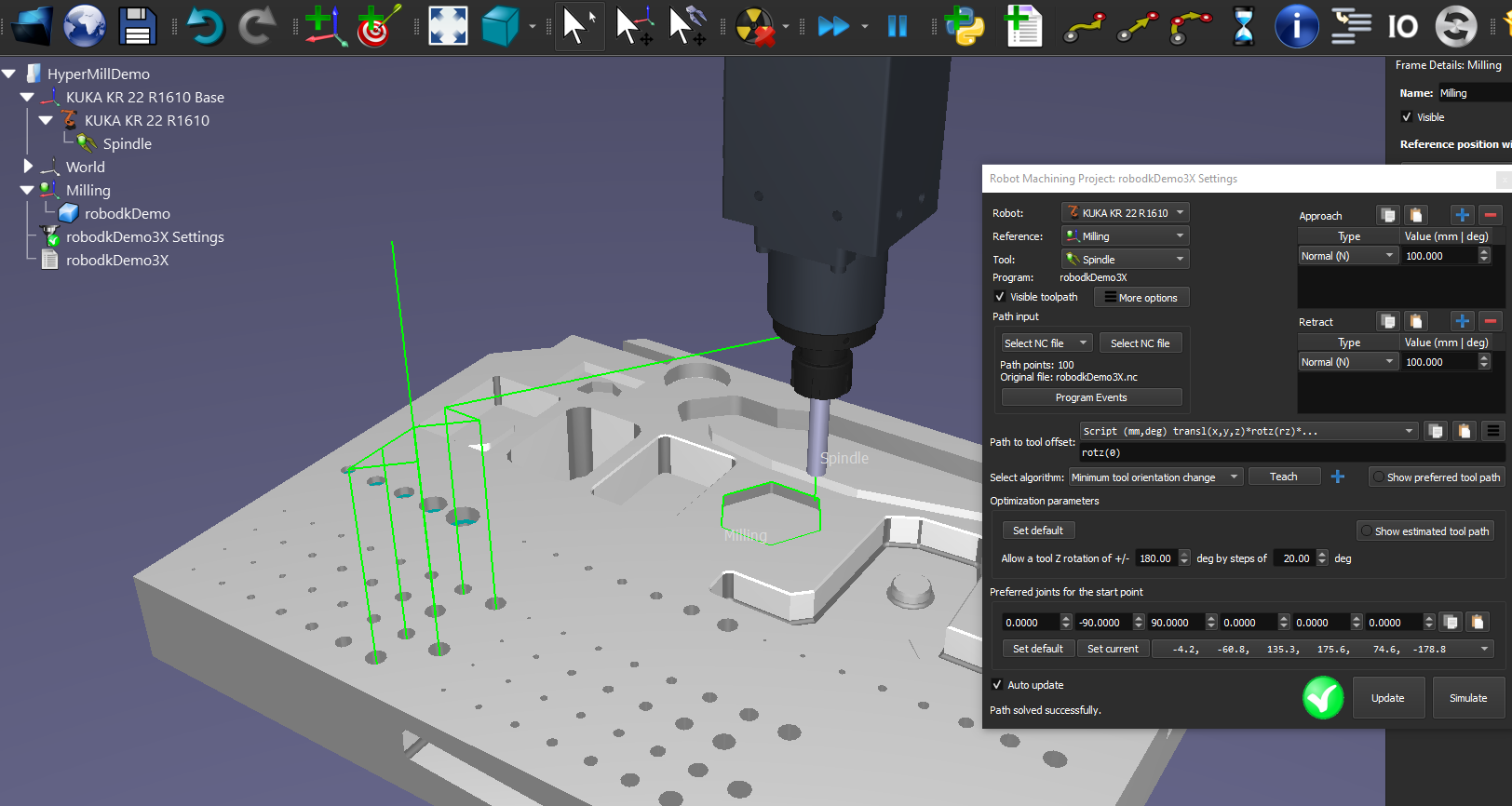
Con este plugin de hyperMILL puede generar fácilmente programas sin errores para el mecanizado robótico directamente desde hyperMILL. Alternativamente, RoboDK también admite archivos de mecanizado estándar APT CLS y G-code.
Más información sobre RoboDK para el mecanizado robótico está disponible en la sección de Mecanizado Robótico. Obtenga más información sobre hyperMILL e hyperCAD-s visitando la página web oficial de Open Mind.
Este documento describe cómo configurar el plugin de RoboDK para hyperMILL y cómo usar hyperMILL para configurar proyectos de mecanizado robótico en RoboDK.