RoboDK Plugin for hyperMILL
hyperMILL Introducción
El plugin RoboDK para OpenMind hyperMILL le permite configurar rápidamente proyectos de mecanizado robótico directamente desde hyperMILL. Con la integración de RoboDK para el software OpenMind, puede combinar fácilmente el software de mecanizado CAD/CAM hyperMILL con RoboDK para simular y programar brazos robóticos industriales para el mecanizado robótico.
Con este plugin de hyperMILL puede generar fácilmente programas sin errores para el mecanizado robótico directamente desde hyperMILL. Alternativamente, RoboDK también admite archivos de mecanizado estándar APT CLS y G-code.
Más información sobre RoboDK para el mecanizado robótico está disponible en la sección de Mecanizado Robótico. Obtenga más información sobre hyperMILL e hyperCAD-s visitando la página web oficial de Open Mind.
Este documento describe cómo configurar el plugin de RoboDK para hyperMILL y cómo usar hyperMILL para configurar proyectos de mecanizado robótico en RoboDK.
Configuración de hyperMILL
Siga estos pasos para instalar el plugin de RoboDK para hyperMILL.
1.Descargue el plugin:
https://robodk.com/files/upload/hyperMILL_AddIn_RoboDK.zip
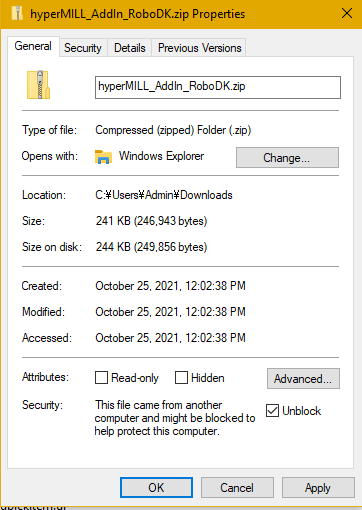
2.Marque el plugin como seguro: haga clic derecho en la carpeta ZIP, seleccione Propiedades y marque la opción Desbloquear.
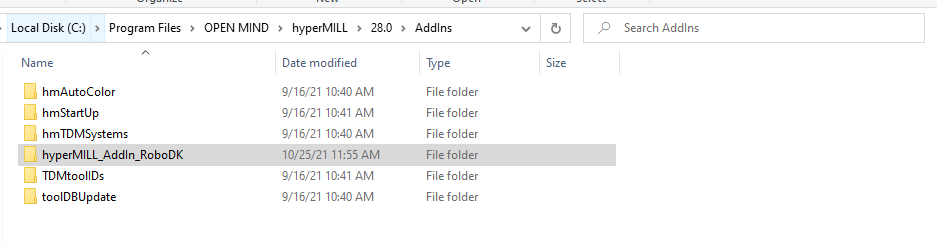
3.Extraiga el contenido de la carpeta ZIP en “C:\Archivos de programa\OPEN MIND\hyperMILL\28.0\AddIns”, o en su directorio de instalación equivalente.
La carpeta del plugin debe verse como se muestra en la siguiente imagen.
Proceso de trabajo de hyperMILL
En hyperMILL/hyperCAD-S puede utilizar el plugin RoboDK para facilitar el envío de trabajos de mecanizado a RoboDK. Esto le permite simular y programar robots para el mecanizado robótico.
Siga estos pasos para configurar automáticamente su proyecto de mecanizado con robot desde hyperMILL/hyperCAD-S:
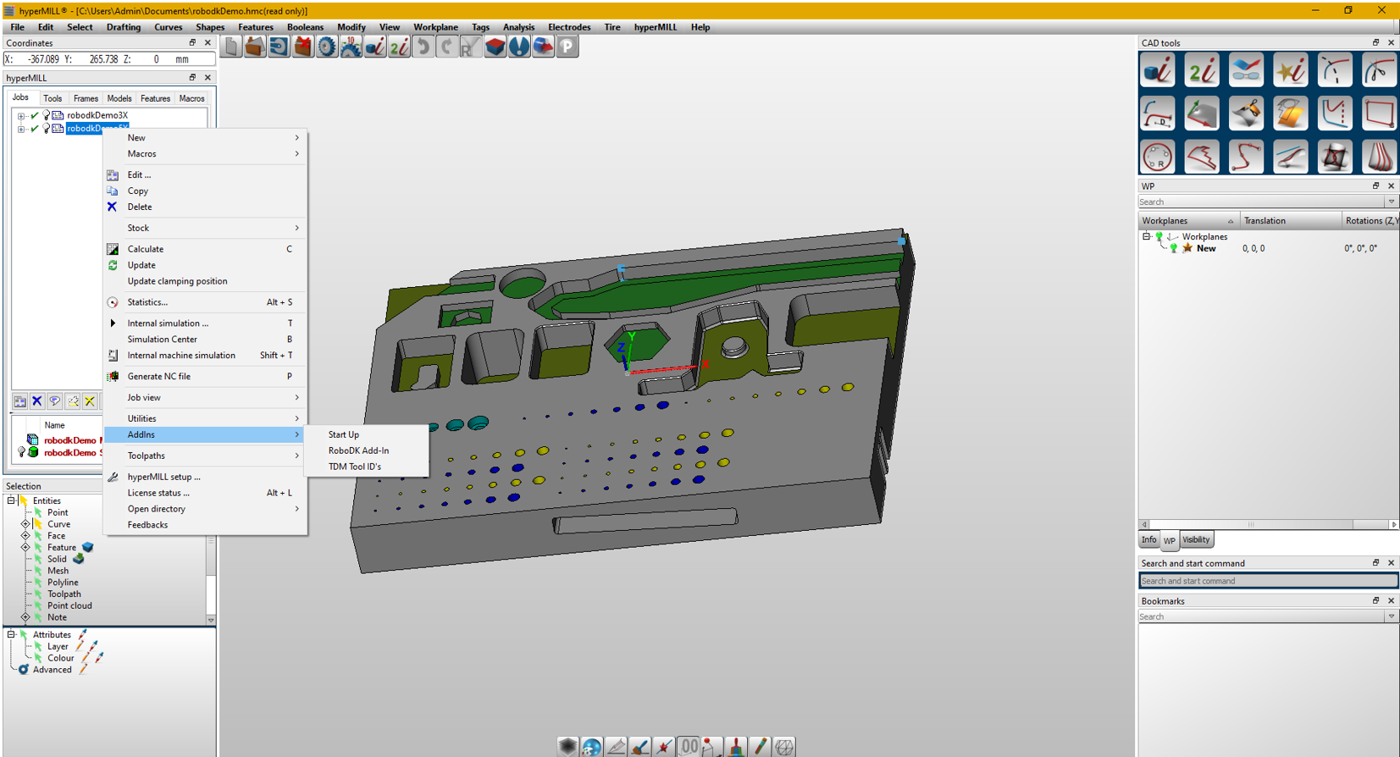
1.Haga clic con el botón derecho en su Trabajo.
2.Seleccione Plugins.
3.Seleccione el Plugin de RoboDK.
Se mostrará una marca de verificación verde si el programa es factible con el robot seleccionado. Si hay algún problema (como singularidades, límites de eje o problemas de alcance), se mostrará una marca roja con un mensaje del problema.
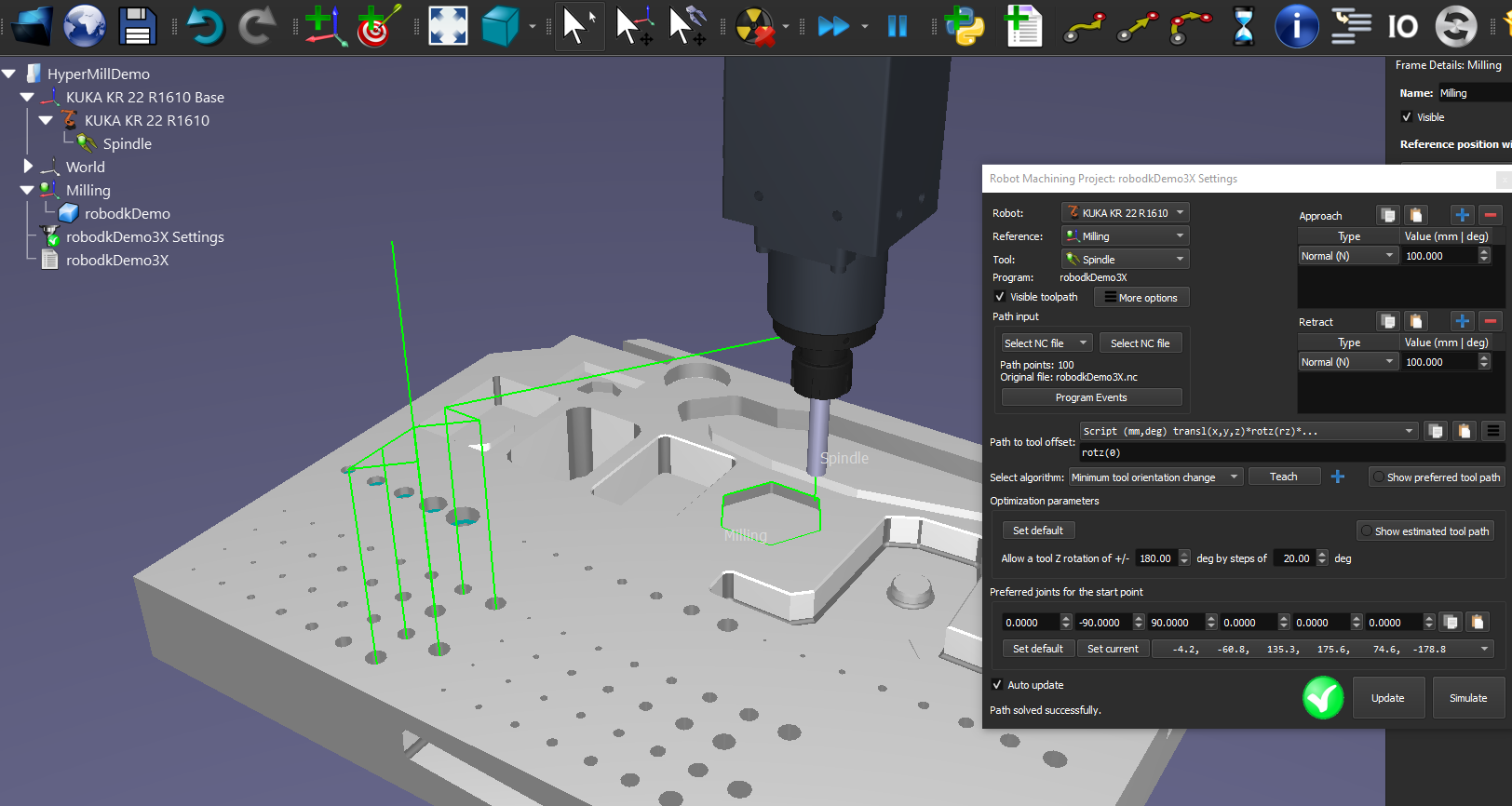
Haga doble clic en el proyecto de mecanizado de robot
Haga clic derecho en un programa y seleccione Ejecutar para simularlo (o haga doble clic en el programa). También puede seleccionar Generar programa de robot (F6) para obtener el programa de robot que debe cargarse en el controlador de robot. Más información sobre cómo generar programas de robot está disponible en la sección Programación fuera de línea.
Si es necesario, haga clic con el botón derecho en un programa y seleccione Seleccionar postprocesador para cambiar el postprocesador. Este paso puede ayudarlo a personalizar la apariencia de su código generado. Más información sobre la selección y personalización de postprocesadores está disponible en la sección de postprocesadores.