Ejemplo de Modificación
Esta sección muestra cómo hacer un pequeño cambio para un postprocesador existente.
Como ejemplo, se realizarán los siguientes cambios en el postprocesador KUKA KRC4 existente:
●Ajustar la velocidad máxima a 500 mm/s. incluso si el robot está programado para moverse más rápido, la velocidad se limitará a 500 mm/s en el postprocesador.
●Generar cada programa como un archivo separado y forzar programas para tener 3000 líneas de código por programa como máximo. Los programas grandes serán divididos en programas más pequeños y llamados secuencialmente.
La sección anterior muestra cómo abrir un postprocesador existente para su edición:
1.Seleccione Programa➔Añadir/Editar Post procesador
2.Seleccione KUKA_KRC4
3.Seleccione OK. El postprocesador será mostrado en el editor de Python IDLE.
En las siguientes secciones se muestra cómo realizar en el editor de texto los cambios sugeridos.
Forzar un límite de velocidad
Siga estos pasos para establecer un límite de velocidad de 500 mm/s y evitar establecer velocidades más altas usando RoboDK:
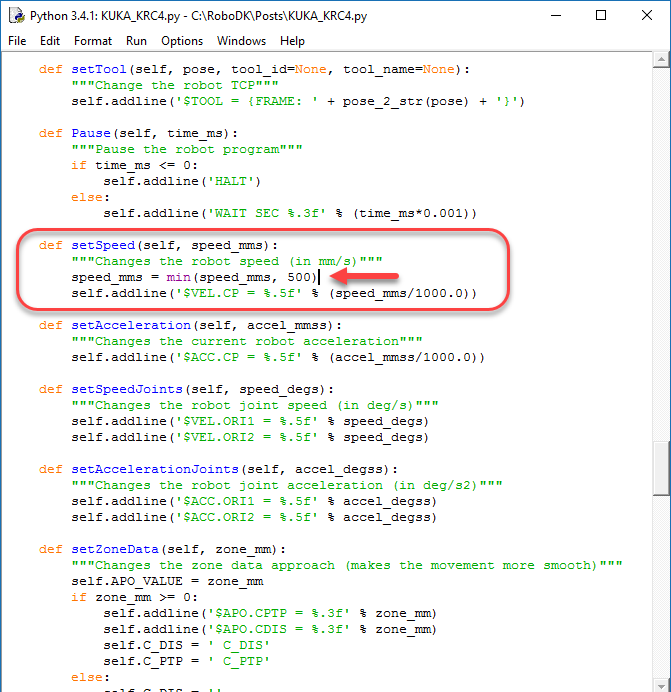
1.Localice la definición de la función setspeed (def setspeed)
2.Añada el siguiente código antes de generar la salida $VEL.CP que cambiará la velocidad en m/s:
speed_mms = min(speed_mms, 500)
Generar un programa por archivo
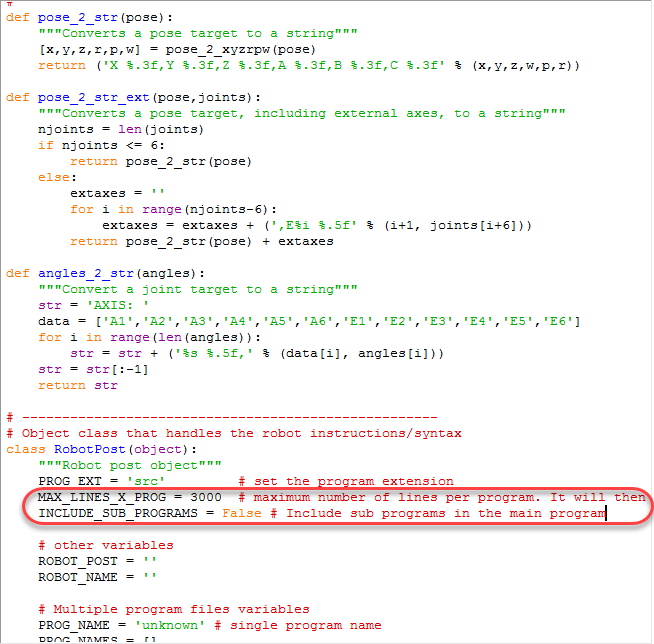
Añada los siguientes cambios para evitar agregar más de un programa por archivo y para generar programas con 3000 líneas de código como máximo:
1.Establezca la variable MAX_LINES_X_PROG en 3000
2.Establezca la variable INCLUDE_SUB_PROGRAMS en falso