Forzar un límite de velocidad
Siga estos pasos para establecer un límite de velocidad de 500 mm/s y evitar establecer velocidades más altas usando RoboDK:
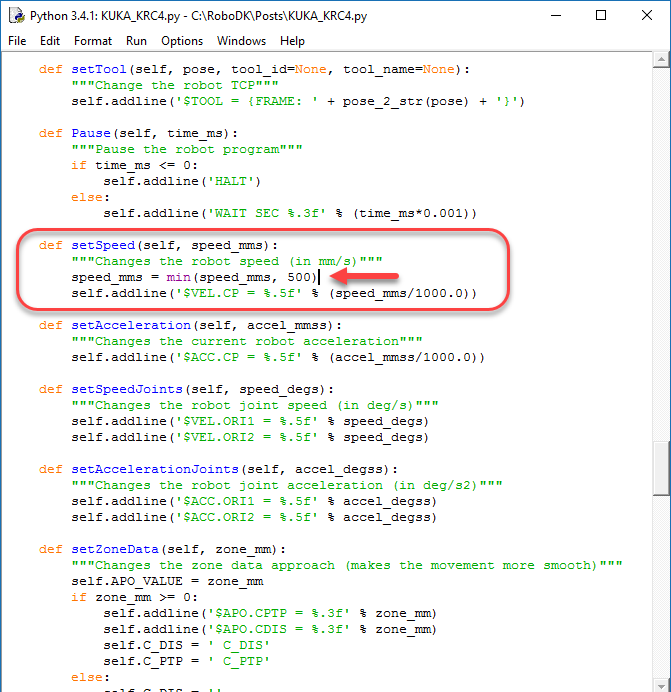
1.Localice la definición de la función setspeed (def setspeed)
2.Añada el siguiente código antes de generar la salida $VEL.CP que cambiará la velocidad en m/s:
speed_mms = min(speed_mms, 500)
Nota: Una velocidad predeterminada de 200 mm/s se define en la variable HEADER, en la parte superior del postprocesador ($VEL.CP=0,2). Esta velocidad por defecto también puede cambiarse si la velocidad no se modifica desde RoboDK.