Simulación de robot realista (RRS)
La simulación realista de robots (RRS) es un estándar que permite proporcionar simulaciones precisas de robots y estimaciones del tiempo de ciclo. Este estándar RRS permite integrar software de controlador original en simulaciones y software de programación fuera de línea.
Los Addins RRS para RoboDK añaden trayectorias de robot y tiempos de ciclo precisos a las simulaciones y programas RoboDK existentes. Este Addin RRS le permite interactuar directamente con el módulo de software de control del robot (RCS) de un fabricante de robots. El RCS es esencialmente el software propietario de planificación de movimiento del fabricante del robot.
Con el Addin RRS de RoboDK, los usuarios pueden conseguir simulaciones muy precisas del comportamiento de los robots generando trayectorias de herramientas y tiempos de ciclo exactos dentro de RoboDK.
Requisitos
Para activar la compatibilidad con RRS en RoboDK, primero debe adquirir el módulo RCS al fabricante del robot. Suele tratarse de una biblioteca (como un archivo dll en Windows) que se vende y activa por separado.
Sugerimos colocar el módulo RCS del fabricante del robot en C:\RoboDK\api\RRS\%BRAND%\. No obstante, la ruta de origen puede especificarse a través del Addin.
Interfaz RRS de RoboDK
RoboDK proporciona una interfaz configurable en Python para la implementación RRS-1 del RCS de cualquier fabricante de robots. Además, proporciona las utilidades y líneas de base necesarias para interactuar entre RoboDK y la interfaz RRS.
Aunque la implementación del RRS entre distintos fabricantes de robots debería ser coherente, la línea de base proporcionada por la interfaz puede necesitar algunos ajustes para una marca específica. RoboDK proporciona una implementación específica para cada fabricante de la interfaz RRS.
RoboDK RRS para Comau (Addin)
El RoboDK RRS para Comau es un Addin de RoboDK específico para los robots Comau. Para instalar un Addin de RoboDK, consulte la sección Addin de la documentación.
Una vez que haya adquirido y activado los módulos RCS necesarios de Comau, podrá empezar a utilizar el Addin RoboDK RRS para Comau.
Para crear un programa RSS, siga estos pasos:
1.Abra los ajustes con Programa➔ RRS para Comau➔ Ajustes
a.Establezca el ID del robot. Normalmente es 0.
b.Establezca la ruta a la carpeta del robot. Suele ser la carpeta principal que contiene los archivos .c5g, .CIO y .xml.
c.Establezca la ruta al archivo del robot. Se trata del archivo .c5g contenido en la carpeta del robot.
d.Establezca la ruta al archivo DLL RRS, normalmente rcscomau.dll.
2.Genere el programa RRS haciendo clic con el botón derecho del ratón en su programa➔ Generar programa RRS (Comau)
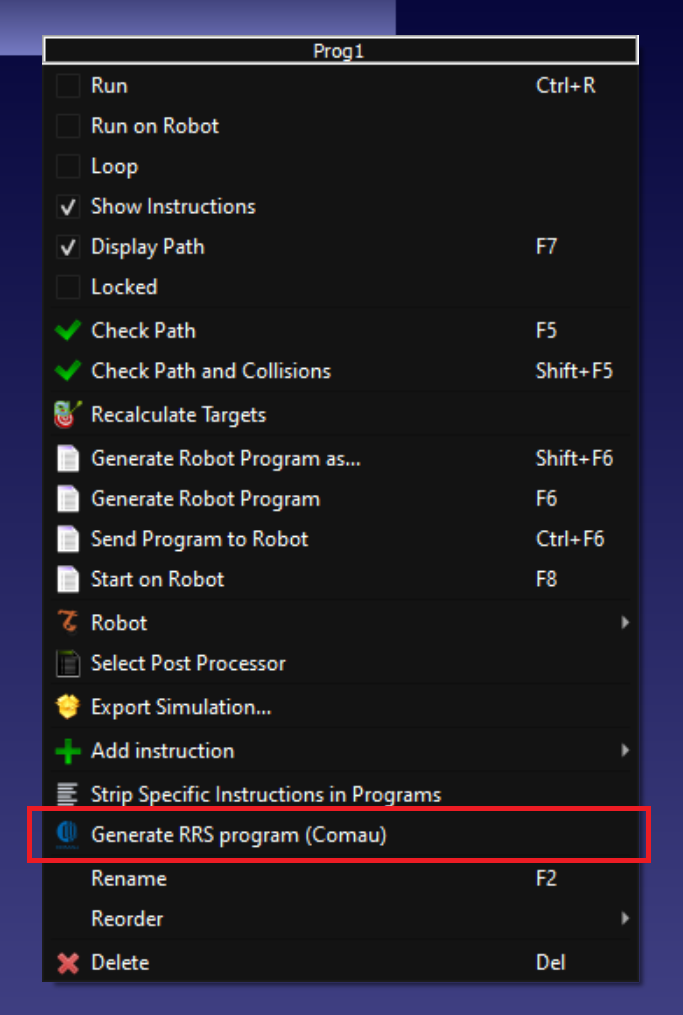
Se creará un nuevo programa con juntas precisas y la estimación del tiempo de ciclo se proporcionará en el nombre del programa.