API de Matlab
MATLAB es un lenguaje de programación propietario desarrollado por MathWorks. Entre otras cosas, MATLAB permite la manipulación de matrices, trazado de funciones y datos y la implementación de algoritmos.
La sección principalse este documento, explica las ventajas de utilizar la API de RoboDK con un lenguaje de programación ampliamente utilizado como Matlab para la programación de robots.
La API de RoboDK de Matlab está disponible después de que RoboDK es instalado en C:/RoboDK/Matlab/. La API es proporcionada como un conjunto de archivos m, incluyendo:
●Robolink.m es una clase que hace de interfaz con RoboDK. Cualquier objeto en el Árbol de la Estación de RoboDK puede ser recuperado mediante el objeto Robolink y está representado por el objeto RobolinkItem (igual que la clase de Python robolink).
●RobolinkItem.m es una clase que representa un elemento RoboDK en el Árbol de la estación. Es posible realizar diferentes operaciones sobre ese elemento (es igual a la clase de Python Robolink.Item).
●transl.m, rotx.m, roty.m y rotz.m son funciones que crean matrices Pose dadas en un vector de traslación XYZ o rotaciones a lo largo de un eje específico.
●Pose_2_XYZRPW.m y XYZRPW_2_Pose.m permite la conversión de poses a la posición XYZ y ángulos de Euler RPW y viceversa. Más información en la sección Sistema de coordenadas.
El código de la muestra está disponible en la siguiente página:
https://robodk.com/Matlab-API
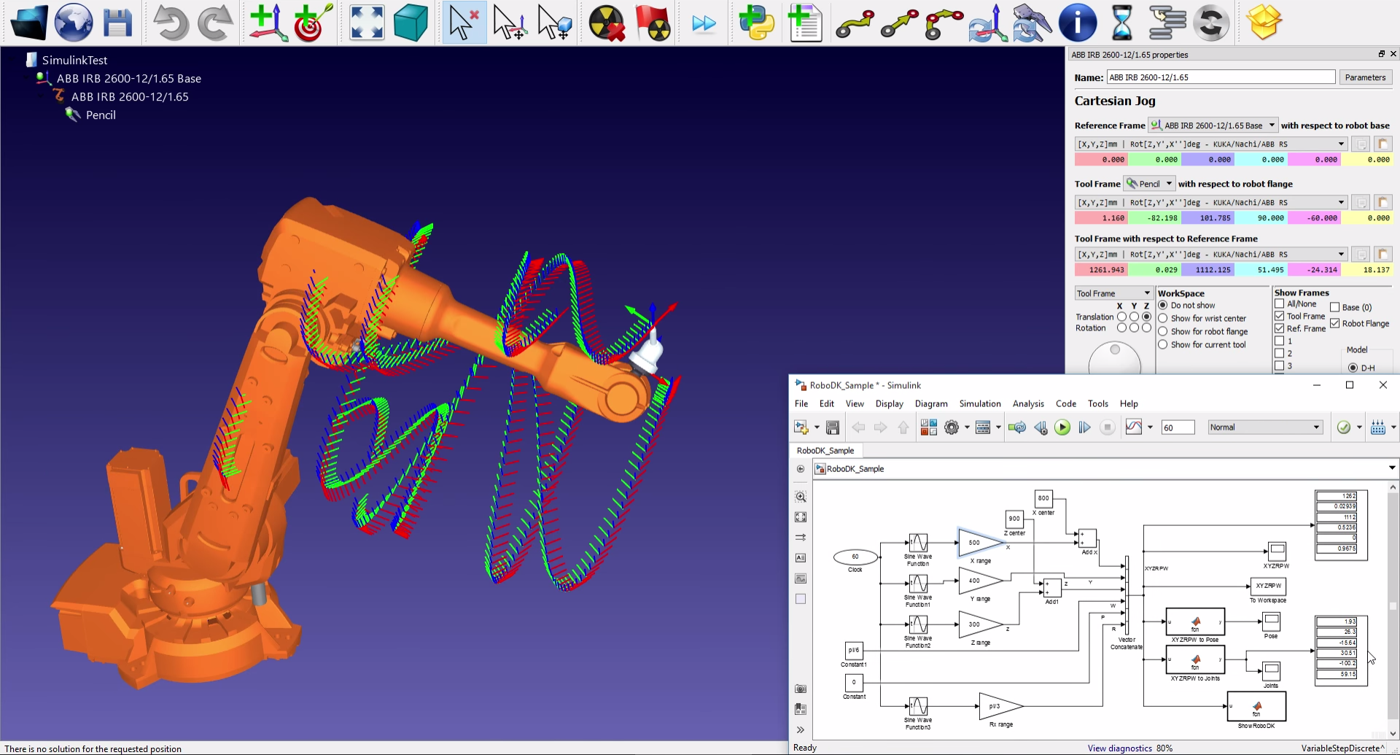
Ejemplo Simulink
Un proyecto Simulink está disponible como un ejemplo. En la simulación, el robot es movido a lo largo de un conjunto de coordenadas XYZ generadas arbitrariamente.
El siguiente vídeo muestra el resultado de ejecutar la simulación:
https://www.youtube.com/watch?v=7DDBMwa0-Oc