API de Python
Pythones un lenguaje de programación de alto nivel ampliamente utilizado para la programación de propósito general. Python es un lenguaje de programación que le permite trabajar más rápido e integrar sus sistemas más efectivamente. La sintaxis de Python permite a los programadores expresar conceptos en menos líneas de código en comparación con otros lenguajes, haciéndolo agradable y fácil de aprender.
La sección previa explica las ventajas de utilizar la API de RoboDK con un lenguaje de programación ampliamente utilizado para la programación de robots como Python.
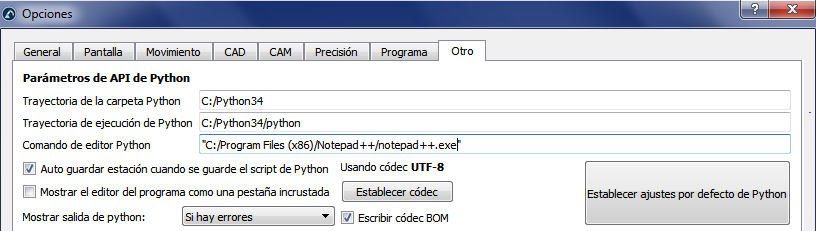
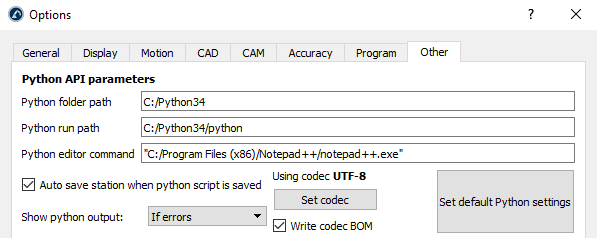
Python es instalado automáticamente e integrado con RoboDK por defecto. Seleccione Herramientas➔Opciones➔ Otro para cambiar la configuración predeterminada (ubicación Python y Editor de Python).
La API de RoboDK para Python se divide en los siguientes dos módulos:
●El módulo robolink (robolink.py): El módulo robolink es la interfaz entre RoboDK y Python. Cualquier objeto en el Árbol de la estación de RoboDK puede ser recuperado mediante un objeto Robolink y está representado por el elemento objeto. Es posible realizar diferentes operaciones en ese elemento según la clase Robolink.Item.
●El módulo robodk (robodk.py): El módulo robodk es una caja de herramientas robóticas para Python que permiten operar con transformaciones Pose y obtener ángulos de Euler para diferentes proveedores de robot. Todos los post-procesadores dependen de este módulo robodk.
Los módulos de Python se encuentran en la carpeta C:/RoboDK/Python/ y son copiados en la ruta de la carpeta Python automáticamente cuando se instala RoboDK o cuando se establece la Configuración por defecto de Python (ver imagen anterior).
En las subsecciones siguientes muestran cómo crear un programa sencillo para la simulación, programación fuera de línea y programación en línea, respectivamente. Más ejemplos están disponibles en la página API de Python para RoboDK. Además, la biblioteca de RoboDK viene con macros muestra de Python en la carpeta C:/RoboDK/Library/Macros/.
Simulación en Python
Siga estos pasos para configurar un proyecto de ejemplo utilizando un robot UR y simular un movimiento con el robot.
1.Seleccione Archivo➔
2.Abra el robot UR10
3.Seleccione Archivo➔
4.Abra el archivo Paint_gun.tool
5.Abra el programa muestra de Python SampleOfflineProgramming.py desde C:/RoboDK/Library/Macros/
6.

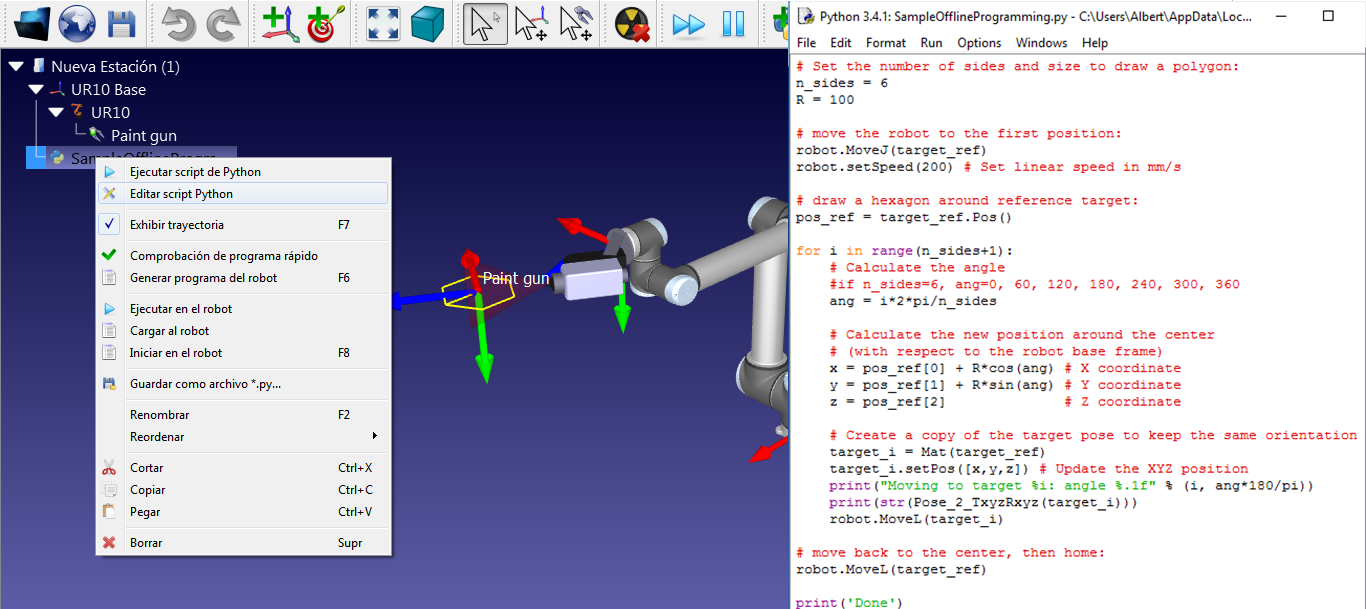
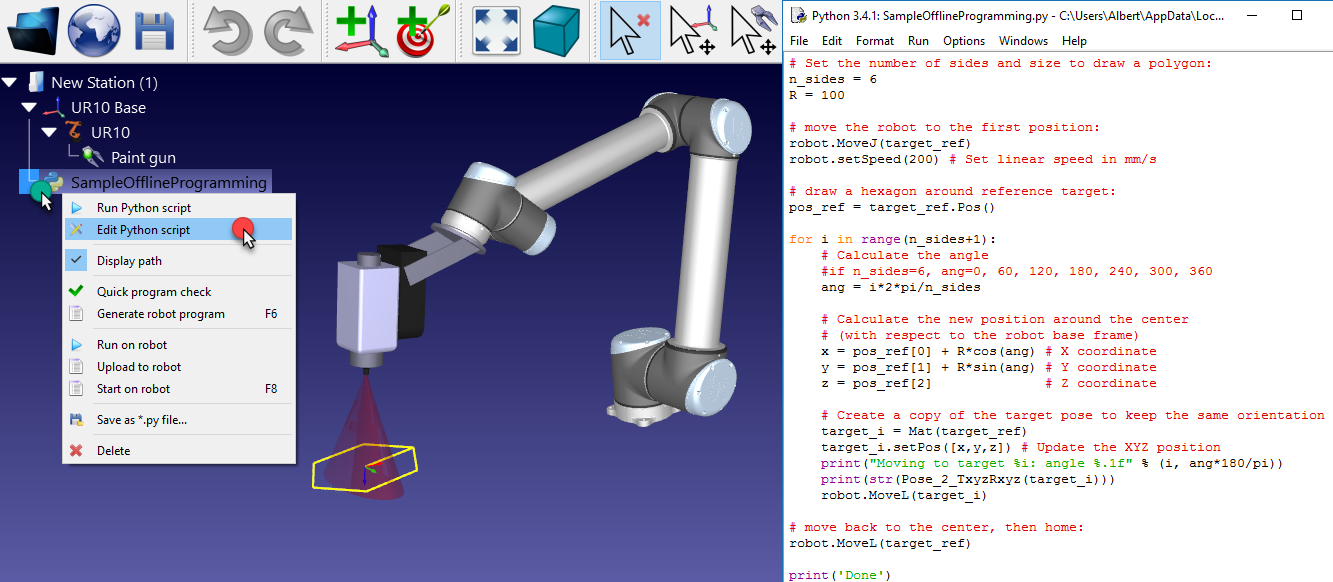
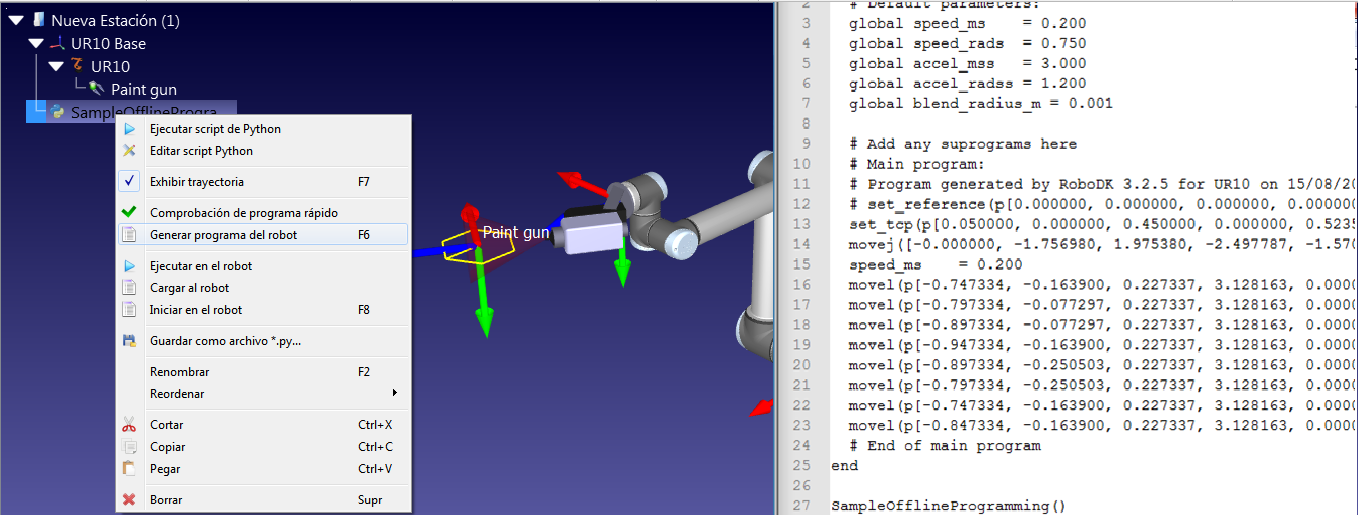
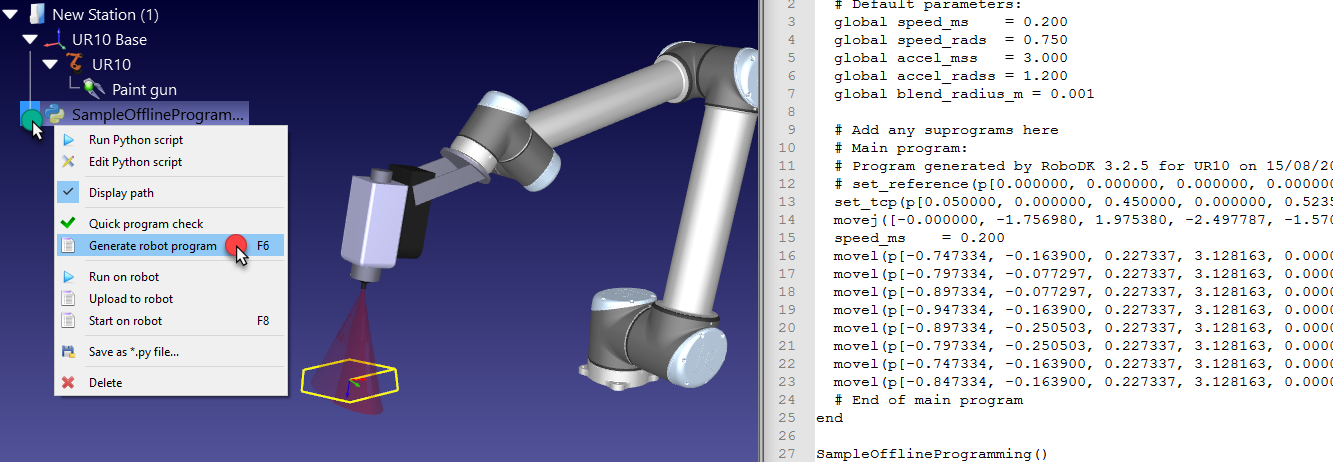
7.Haga doble clic en el elemento SampleOfflineProgramming para ejecutar la simulación. El robot debe dibujar un hexágono alrededor de la posición actual del robot y la traza del TCP se mostrará en amarillo.
Alternativamente, haga clic derecho en el programa y seleccione 
8.Haga clic derecho en el elemento 
La macro SampleOfflineProgramming dibujará un polígono de n_sides lados y radio R en la posición actual del robot, con respecto al sistema de referencia del robot. Si lo desea, mueva el robot a una ubicación diferente cambiando las dimensiones del polígono y volviendo a ejecutar el programa.
Este ejemplo es similar al programa que se muestra en la sección programación fuera de línea del sitio web (vídeo incluido).
Python OLP
Los programas de Python pueden ser generados fuera de línea utilizando el mismo código Python utilizado para simular el robot (como se muestra en la sección anterior Simulación Python). La programación fuera de línea permite generar programas de robot que pueden ser ejecutadas en un controlador de robot específico:
1.Haga clic derecho en un
2.Seleccione Generar programa de robot (F6)
En este caso el programa no se simula pero es ejecutado rápidamente para obtener el resultado: un programa de robot específico para un controlador de robot.
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
Programación en línea de Python
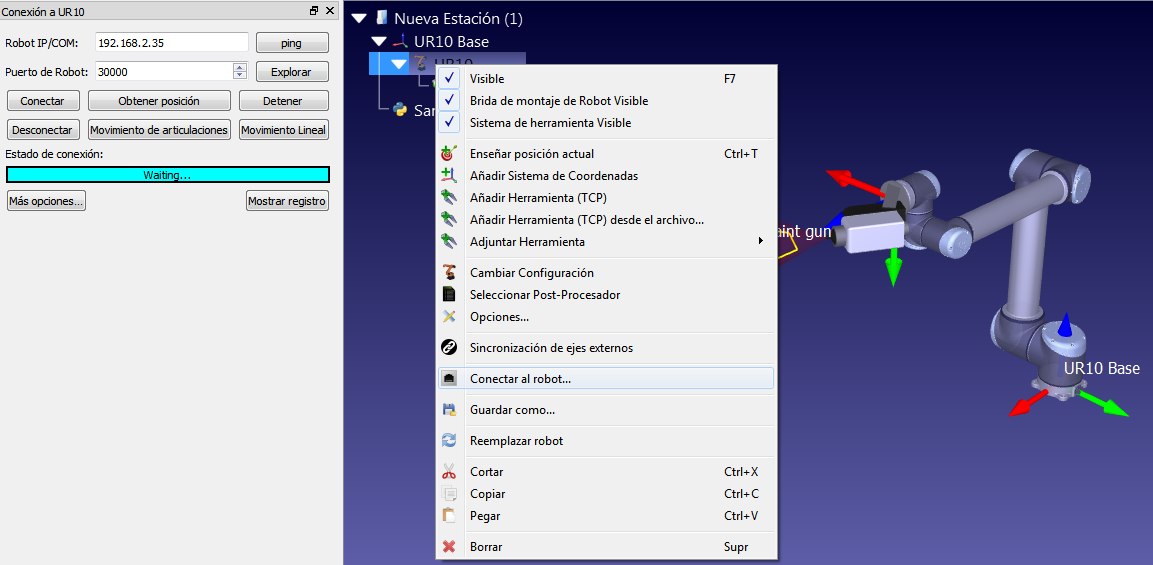
Los programas de Python se pueden ejecutar directamente en el robot utilizando el mismo código Python utilizado para simular el robot (como se muestra en la sección Simulación de Python). La programación en línea permite la ejecución de un programa genérico en un controlador de robot específica utilizando controladores de robot:
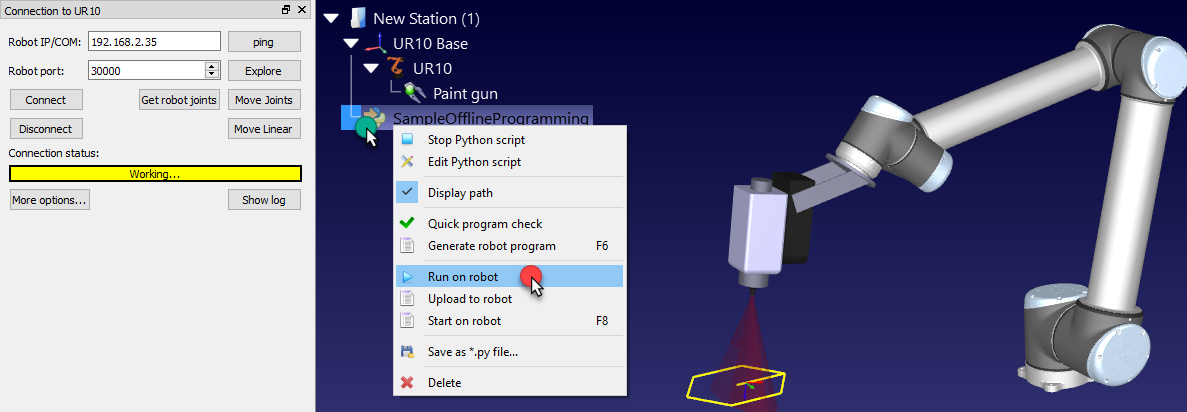
1.Haga clic derecho en una programa
2.Seleccione Ejecutar en robot
El programa se ejecutará en el robot en la medida en que se ejecute el programa en Python.
RDK = robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)