API de RoboDK
C# (pronunciado "C sharp") es un lenguaje de programación desarrollado por Microsoft y diseñado para la construcción de una gran variedad de aplicaciones que se ejecutan en .NET Framework. C# es simple, potente, de tipo seguro y orientado a objetos.
La sección principal de este documento explica las ventajas de utilizar la API de RoboDK con un lenguaje de programación ampliamente utilizado como C# para la programación de robots.
La API de RoboDK para C# es un archivo fuente de RoboDK.cs que contiene la clase RoboDK (similar a la clase Python robolink), a la clase RoboDK.Item (similar a la clase Python Robolink.Item API), y otras herramientas para robótica tales como una clase Matriz (RoboDK.Mat) para operaciones matriciales para operar con transformaciones Pose.
La API de RoboDK para C# está provista de un proyecto de ejemplo como se muestra en la siguiente imagen (el código fuente completo se incluye).
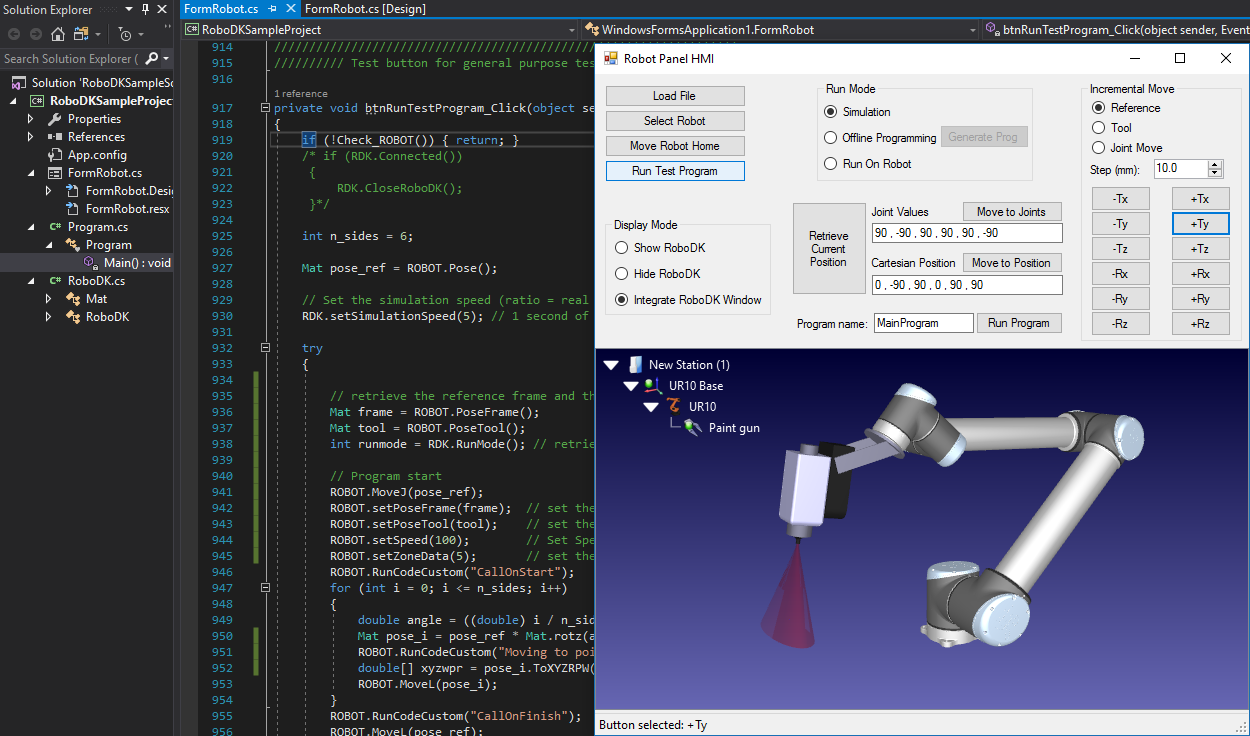
Seleccione Cargar Archivo para abrir una estación RoboDK o cualquier otro archivo soportado por RoboDK. Si se carga un robot, la variable ROBOT será actualizada en consecuencia (igual que usar Seleccionar Robot).
El siguiente vídeo muestra una visión general del proyecto de ejemplo de C# utilizando la API de RoboDK:
https://www.youtube.com/watch?v=3I6OK1Kd2Eo
Los programas en C# son simulados por defecto cuando se utilizan comandos del robot (como MoveJ, MoveL o SetDO). Cuando se inicia el proyecto en C# de ejemplo, el modo de simulación también se selecciona por defecto.

Esto significa que los movimientos del robot se simularán en RoboDK. Por ejemplo, podemos mover el robot en pasos de 10 mm seleccionando los botones a la derecha (+ Tx, -Tx, ...), o podemos seleccionar Ejecutar Programa de Prueba para ejecutar un movimiento hexagonal alrededor de la posición actual del robot.
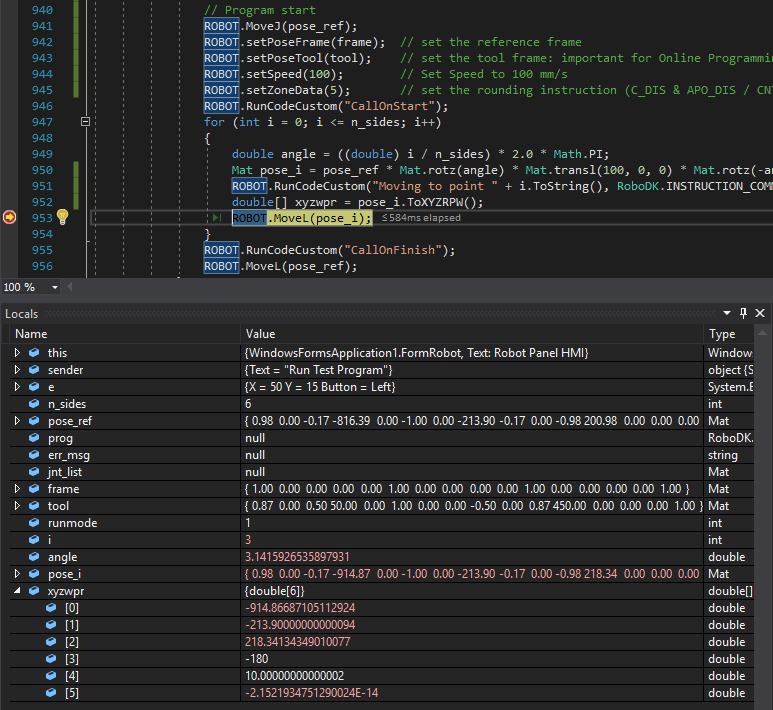
Establezca algunos puntos de interrupción para depurar su aplicación e inspeccionar las posiciones del robot. Las posiciones del Robot pueden ser definidos como coordenadas de articulaciones o variables Mat (Matrices Pose de 4x4) y pueden ser inspeccionados como formato XYZWPR para solucionar problemas del programa. Más información acerca de los sistemas de coordenadas en la sección Sistema de Coordenadas.
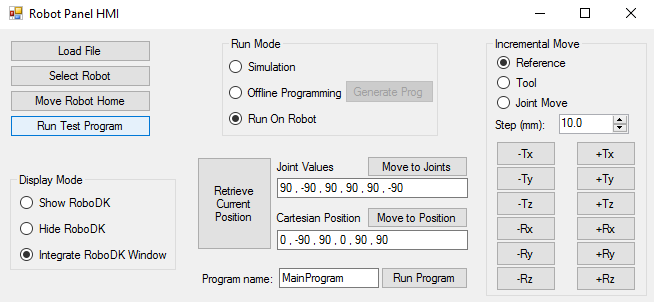
También es posible cambiar el modo de ejecución a Programación Fuera de Línea o Programación en Línea (Ejecutar en Robot), como se muestra en las siguientes secciones.
Los programas C# pueden ser generados fuera de línea utilizando el mismo código C# que utilizado para simular el robot (Programación Fuera de Línea). Siga estos pasos para probar esta característica:
1.Seleccione Programación fuera de línea en la sección Modo de Ejecución
2.Seleccione Ejecutar Programa de Prueba o cualquier otra combinación de movimientos
3.Seleccione Generar Prog para obtener el programa del robot específico del proveedor
En este caso el programa no se simula pero es ejecutado de forma rápida para obtener el resultado: un programa de robot específico para un controlador de robot. El Modo de Ejecución se cambiará de nuevo a la simulación, una vez que se genera el programa.

Los programas de C# se pueden ejecutar directamente en el robot utilizando el mismo código C# utilizado para la simulación. La programación en línea permite la ejecución de un programa genérico en un controlador de robot específico utilizando los controladores del Robot. Siga estos pasos para probar esta función usando el proyecto de ejemplo de C#:
1.Seleccione Ejecutar en robot en la sección Modo Ejecución
2.Seleccione otros comandos que harán que un robot se mueva
Los movimientos se ejecutarán en el robot real y el simulador sincronizará los movimientos con el robot.
RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);