Ejemplo Simulink
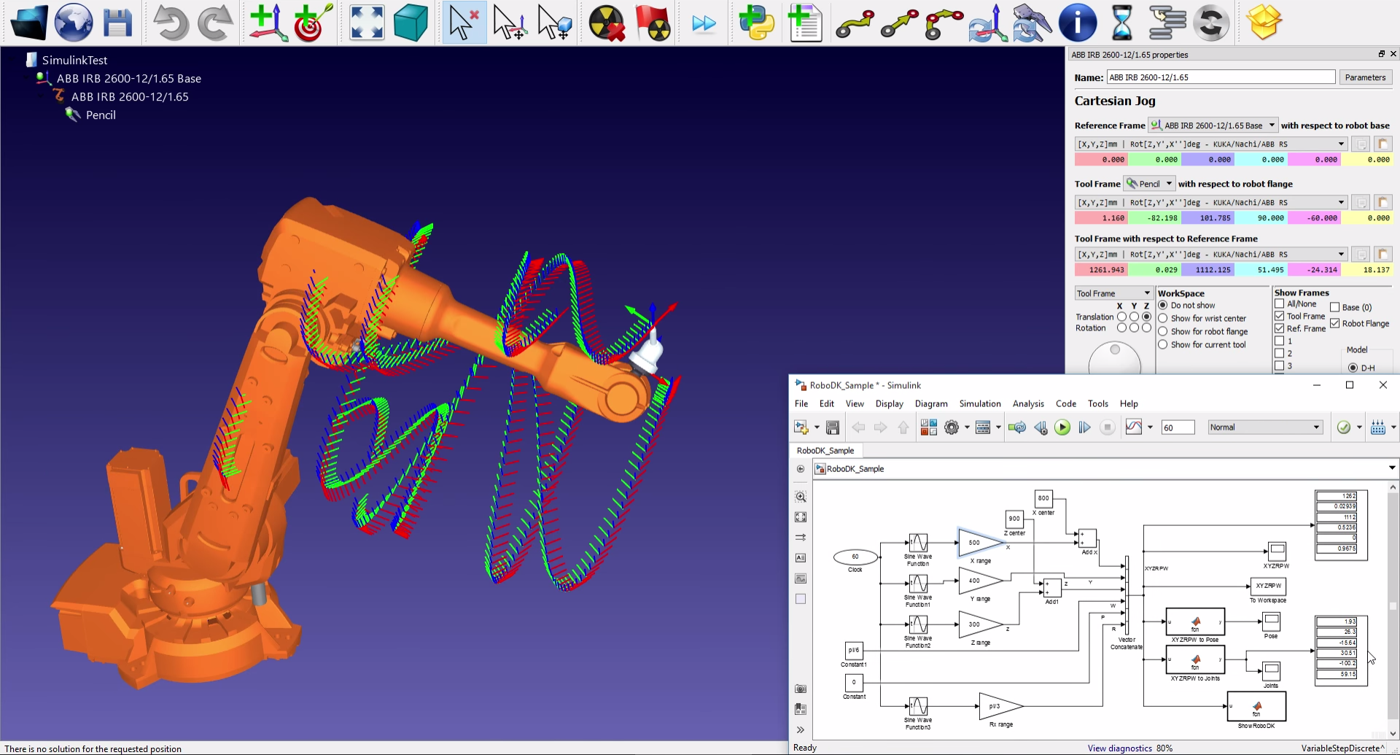
Un proyecto Simulink está disponible como un ejemplo. En la simulación, el robot es movido a lo largo de un conjunto de coordenadas XYZ generadas arbitrariamente.
El siguiente vídeo muestra el resultado de ejecutar la simulación:
https://www.youtube.com/watch?v=7DDBMwa0-Oc