Python OLP
Los programas de Python pueden ser generados fuera de línea utilizando el mismo código Python utilizado para simular el robot (como se muestra en la sección anterior Simulación Python). La programación fuera de línea permite generar programas de robot que pueden ser ejecutadas en un controlador de robot específico:
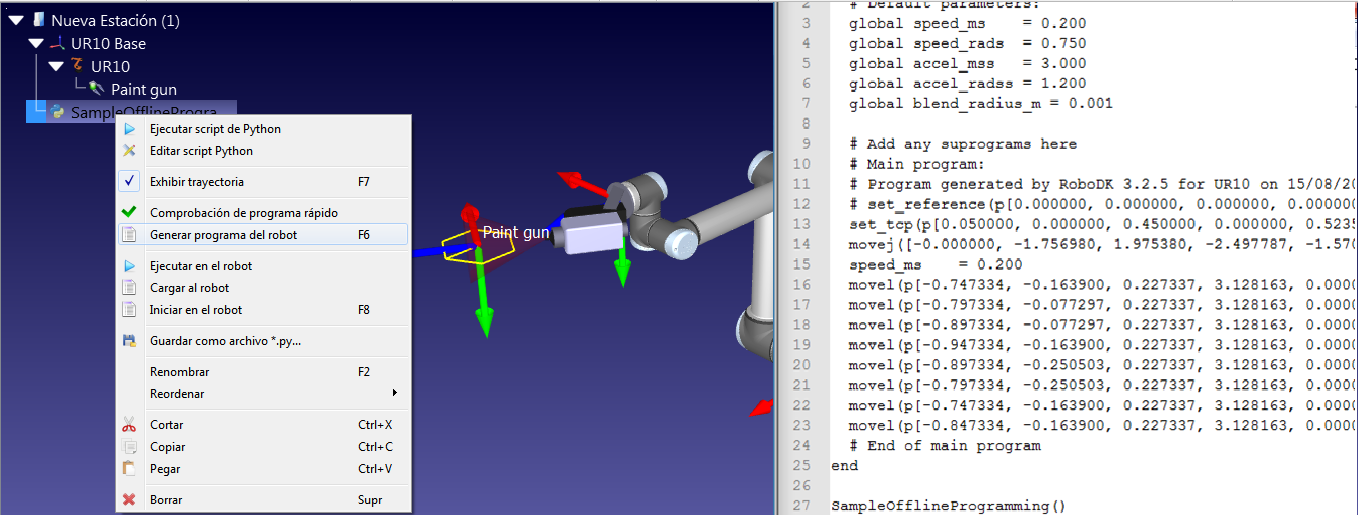
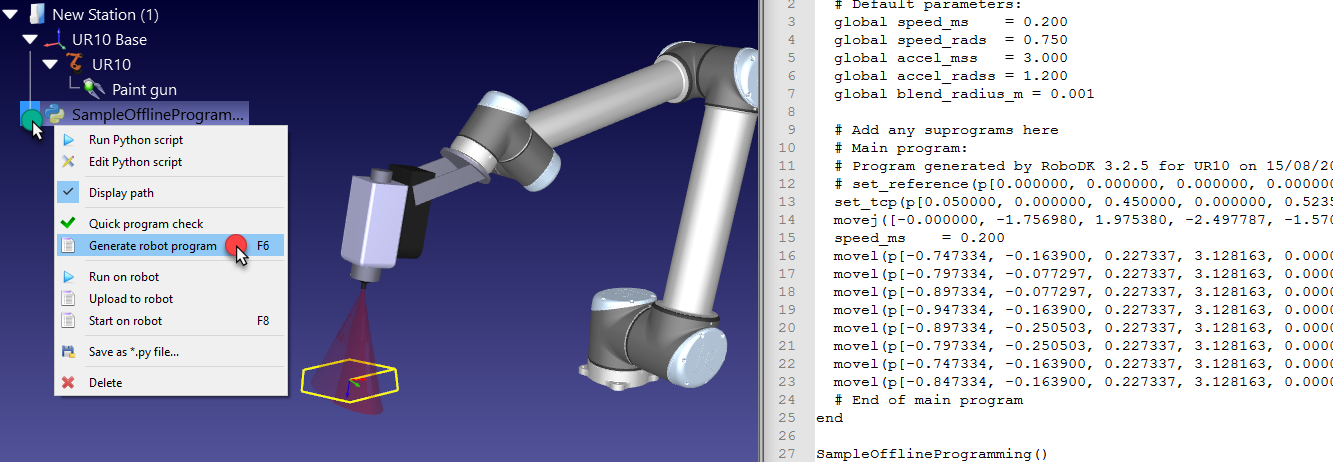
1.Haga clic derecho en un 
2.Seleccione Generar programa de robot (F6)
En este caso el programa no se simula pero es ejecutado rápidamente para obtener el resultado: un programa de robot específico para un controlador de robot.
Consejo: Haga clic derecho en un robot y seleccione Seleccionar Post-procesador para especificar un postprocesador diferente para la programación fuera de línea (como se muestra en la sección post-procesador).
Nota: La opción Generar programa de robot establecerá automáticamente el Modo Ejecutaren la conexión RDK/Robolink para RUNMODE_MAKE_ROBOTPROG. En otras palabras, es posible generar mediante programación el programa específico del proveedor en lugar de simular que el programa de Python se ejecuta fuera de la interfaz gráfica de usuario de RoboDK. Por ejemplo:
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)