Simulación en Python
Siga estos pasos para configurar un proyecto de ejemplo utilizando un robot UR y simular un movimiento con el robot.
1.Seleccione Archivo➔
2.Abra el robot UR10
3.Seleccione Archivo➔
4.Abra el archivo Paint_gun.tool
5.Abra el programa muestra de Python SampleOfflineProgramming.py desde C:/RoboDK/Library/Macros/
6.

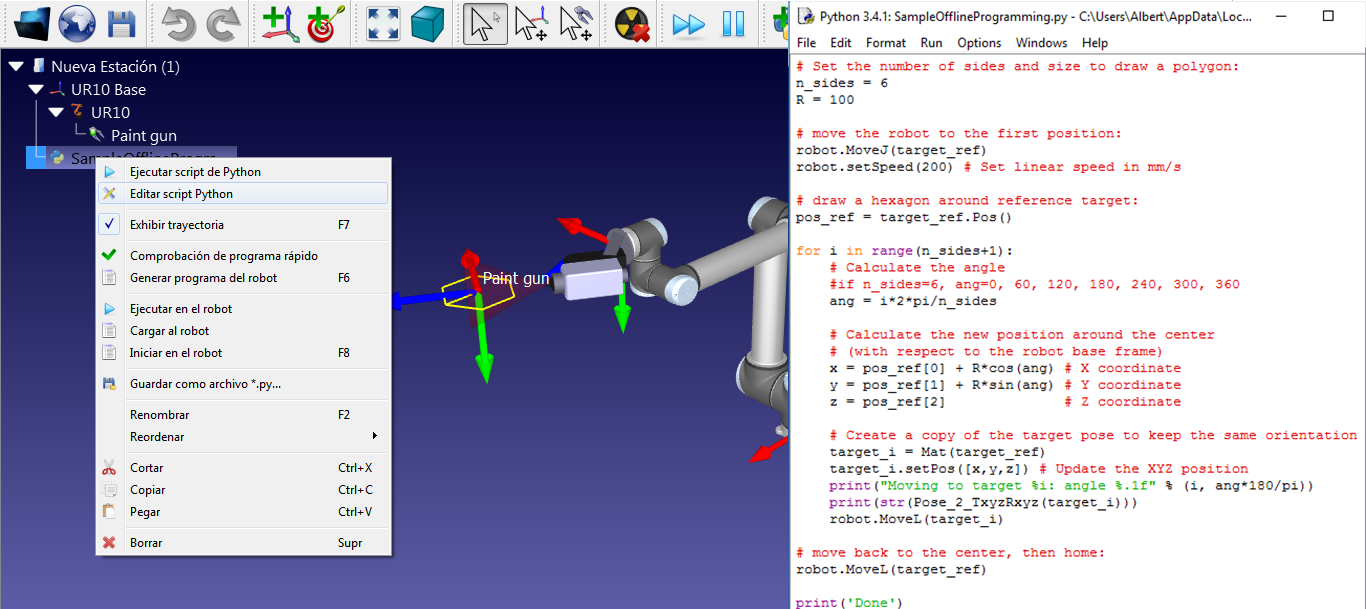
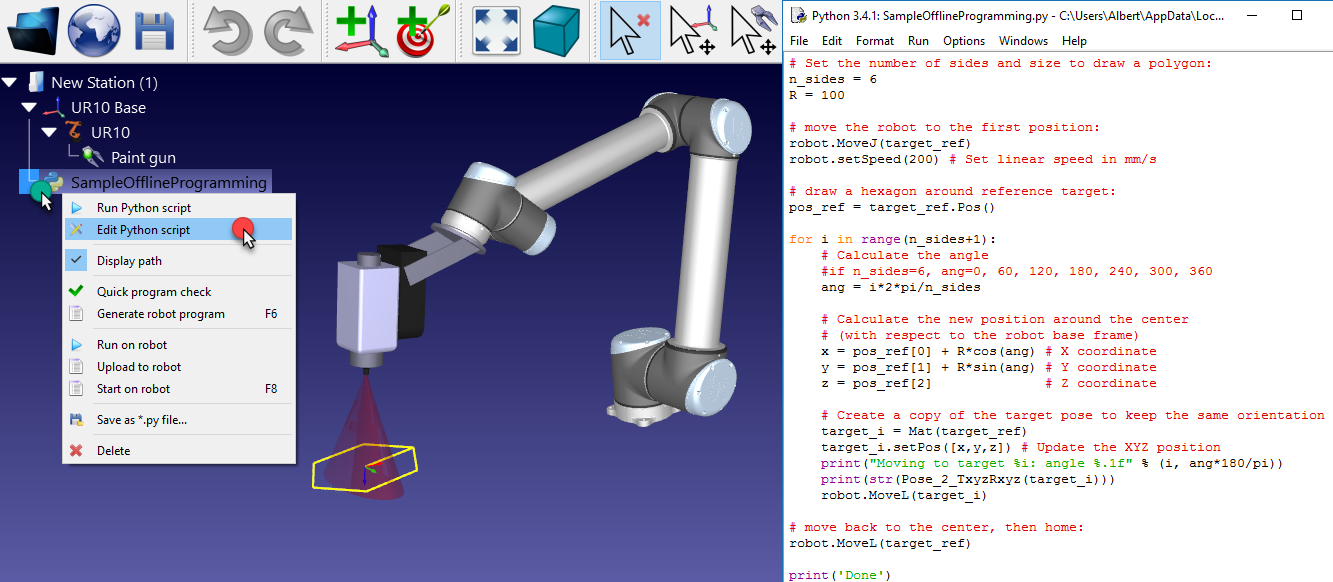
7.Haga doble clic en el elemento SampleOfflineProgramming para ejecutar la simulación. El robot debe dibujar un hexágono alrededor de la posición actual del robot y la traza del TCP se mostrará en amarillo.
Alternativamente, haga clic derecho en el programa y seleccione 
8.Haga clic derecho en el elemento 
La macro SampleOfflineProgramming dibujará un polígono de n_sides lados y radio R en la posición actual del robot, con respecto al sistema de referencia del robot. Si lo desea, mueva el robot a una ubicación diferente cambiando las dimensiones del polígono y volviendo a ejecutar el programa.
Este ejemplo es similar al programa que se muestra en la sección programación fuera de línea del sitio web (vídeo incluido).