API de RoboDK
Los programas en C# son simulados por defecto cuando se utilizan comandos del robot (como MoveJ, MoveL o SetDO). Cuando se inicia el proyecto en C# de ejemplo, el modo de simulación también se selecciona por defecto.

Esto significa que los movimientos del robot se simularán en RoboDK. Por ejemplo, podemos mover el robot en pasos de 10 mm seleccionando los botones a la derecha (+ Tx, -Tx, ...), o podemos seleccionar Ejecutar Programa de Prueba para ejecutar un movimiento hexagonal alrededor de la posición actual del robot.
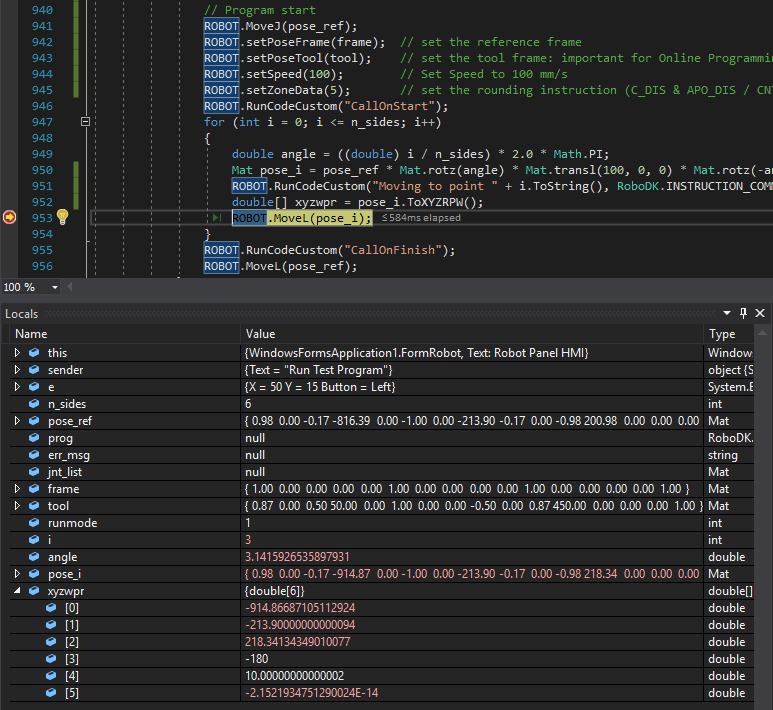
Establezca algunos puntos de interrupción para depurar su aplicación e inspeccionar las posiciones del robot. Las posiciones del Robot pueden ser definidos como coordenadas de articulaciones o variables Mat (Matrices Pose de 4x4) y pueden ser inspeccionados como formato XYZWPR para solucionar problemas del programa. Más información acerca de los sistemas de coordenadas en la sección Sistema de Coordenadas.
También es posible cambiar el modo de ejecución a Programación Fuera de Línea o Programación en Línea (Ejecutar en Robot), como se muestra en las siguientes secciones.