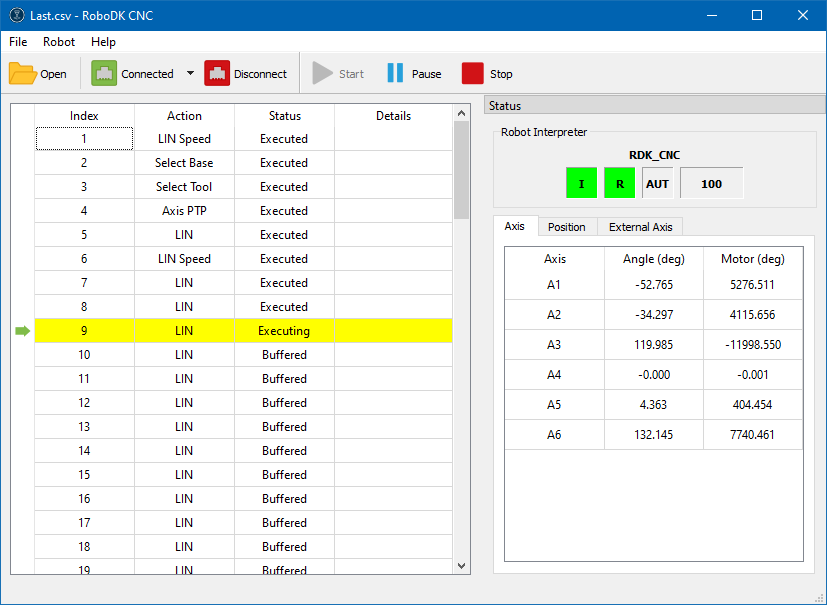
Interfaz de usuario del CNC de RoboDK
El CNC RoboDK permite alimentar grandes programas a un controlador de robot.
La ventana principal de RoboDK CNC contiene los siguientes elementos:
1.Menú principal
2.Barra de herramientas
3.Tabla de instrucciones
4.Panel de estado
Las operaciones del menú principal y de la barra de herramientas se solapan.
| Abra | Abra un archivo CSV generado con el postprocesador CNC e RoboDK . |
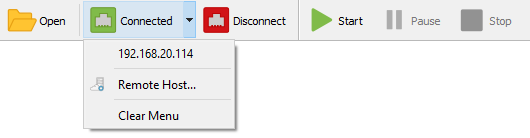
| Conecte | Este icono indica que actualmente no hay conexión con el sistema de control del robot. Al pulsar este botón se abrirá el menú del historial de conexiones. |
| Host remoto... | Esta acción abrirá el cuadro de diálogo Nueva conexión para conectarse a la dirección IP y al puerto del sistema de control remoto del robot. |
| Conectando | Este icono indica un intento de conexión con el sistema de control del robot. |
| Conectado | Este icono indica que la conexión con el sistema de control del robot se ha realizado correctamente. |
| Desconecte | Esta acción interrumpe inmediatamente la conexión con el sistema de control del robot. Tenga cuidado, el robot puede seguir moviéndose incluso después de desconectar el CNC RoboDK. |
| Inicie | Comience a ejecutar los movimientos del robot con la primera instrucción. O continúe ejecutando un programa iniciado previamente. |
| Pausa | Suspender la ejecución de un programa iniciado previamente. |
| Stop | Cancelar la ejecución del programa y detener los movimientos del robot. |









El panel de estado contiene información sobre el programa KRL que se está ejecutando en ese momento, indicadores de preparación y de anulación de velocidad e información sobre la posición actual del robot.
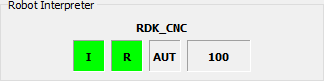
El panel del Intérprete de Robots contiene cuatro indicadores:
Accionamientos y movimiento de robots |
| Los accionamientos del robot se encienden y el robot está listo para realizar movimientos. |
| Los actuadores del robot están desconectados y el robot no está listo para funcionar. | |
Estado del programa KRL |
| El programa del robot no está cargado. |
| El programa del robot está cargado y listo para su ejecución. | |
| El programa del robot se está ejecutando. | |
| El programa del robot se ha interrumpido debido a un error. | |
| El programa del robot se ejecutó en su totalidad. | |
Modo controlador del robot |
| El modo de funcionamiento actual del sistema de control del robot. Puede tomar los siguientes valores: T1, T2, AUT, EXT. |
Anulación de velocidad |
| El valor de anulación de la velocidad de ejecución del programa en porcentaje de 0 a 100. |








