RoboDK CNC
RoboDK CNC es una colección de herramientas que facilitan el uso de robots como un CNC. El CNC RoboDK permite la ejecución de programas de gran tamaño hasta un número ilimitado de líneas en modo streaming. Los programas de gran tamaño suelen ser el resultado del uso de sistemas CAD/CAM y de la utilización de robots para el mecanizado.
La mayoría de los sistemas de control de robots disponen de recursos muy limitados y no pueden cargar grandes programas en la memoria. El CNC RoboDK elimina estas limitaciones enviando estas coordenadas una a una o en grupos de subprogramas al sistema de control (también conocido como alimentación por goteo).
RoboDK ofrece un Addin dedicado (RoboDK CNC) que permite ejecutar grandes proyectos de mecanizado robotizado en controladores de robots KUKA. RoboDK también ofrece postprocesadores dedicados para algunos controladores para implementar esta estrategia.
Instale el Addin CNC de RoboDK
Si ya dispone de RoboDK con el plugin Add-In Manager instalado, la única acción que debe realizar es instalar el plugin RoboDK CNC desde la biblioteca en línea de RoboDK.
El servidor de interfaz C3 Bridge debe estar instalado en el sistema de control del robot. Para más información al respecto, consulte el controlador RoboDK para KUKA.
Interfaz de usuario del CNC de RoboDK
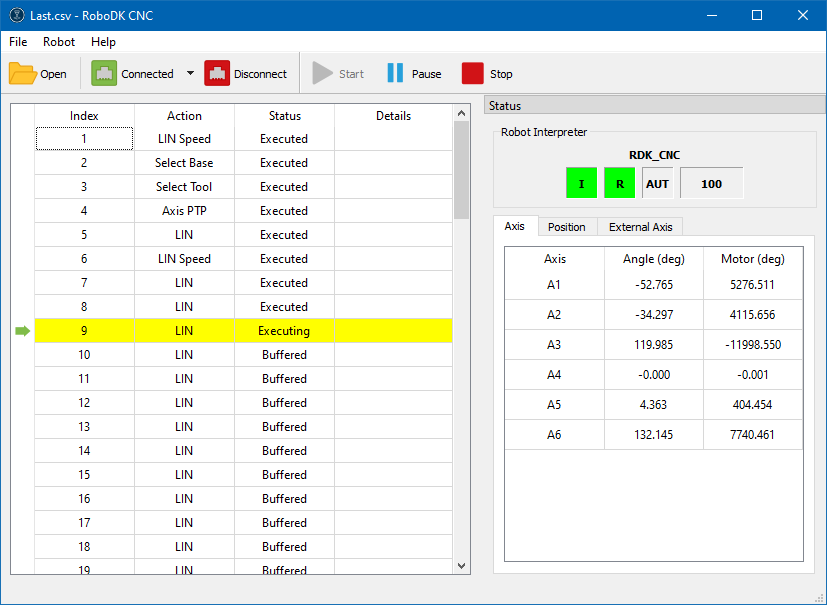
El CNC RoboDK permite alimentar grandes programas a un controlador de robot.
La ventana principal de RoboDK CNC contiene los siguientes elementos:
1.Menú principal
2.Barra de herramientas
3.Tabla de instrucciones
4.Panel de estado
Las operaciones del menú principal y de la barra de herramientas se solapan.
| Abra | Abra un archivo CSV generado con el postprocesador CNC e RoboDK . |
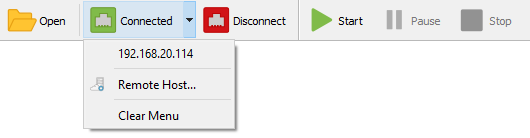
| Conecte | Este icono indica que actualmente no hay conexión con el sistema de control del robot. Al pulsar este botón se abrirá el menú del historial de conexiones. |
| Host remoto... | Esta acción abrirá el cuadro de diálogo Nueva conexión para conectarse a la dirección IP y al puerto del sistema de control remoto del robot. |
| Conectando | Este icono indica un intento de conexión con el sistema de control del robot. |
| Conectado | Este icono indica que la conexión con el sistema de control del robot se ha realizado correctamente. |
| Desconecte | Esta acción interrumpe inmediatamente la conexión con el sistema de control del robot. Tenga cuidado, el robot puede seguir moviéndose incluso después de desconectar el CNC RoboDK. |
| Inicie | Comience a ejecutar los movimientos del robot con la primera instrucción. O continúe ejecutando un programa iniciado previamente. |
| Pausa | Suspender la ejecución de un programa iniciado previamente. |
| Stop | Cancelar la ejecución del programa y detener los movimientos del robot. |









El panel de estado contiene información sobre el programa KRL que se está ejecutando en ese momento, indicadores de preparación y de anulación de velocidad e información sobre la posición actual del robot.
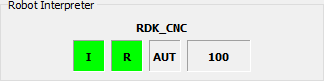
El panel del Intérprete de Robots contiene cuatro indicadores:
Accionamientos y movimiento de robots |
| Los accionamientos del robot se encienden y el robot está listo para realizar movimientos. |
| Los actuadores del robot están desconectados y el robot no está listo para funcionar. | |
Estado del programa KRL |
| El programa del robot no está cargado. |
| El programa del robot está cargado y listo para su ejecución. | |
| El programa del robot se está ejecutando. | |
| El programa del robot se ha interrumpido debido a un error. | |
| El programa del robot se ejecutó en su totalidad. | |
Modo controlador del robot |
| El modo de funcionamiento actual del sistema de control del robot. Puede tomar los siguientes valores: T1, T2, AUT, EXT. |
Anulación de velocidad |
| El valor de anulación de la velocidad de ejecución del programa en porcentaje de 0 a 100. |









Ejemplo de flujo de trabajo
En esta sección se describen los pasos necesarios para utilizar el CNC RoboDK para ejecutar un programa en una unidad de control KUKA.
1.Inicie la aplicación RoboDK CNC: con el plugin activado, seleccione Utilidades➔ RoboDK CNC.
2.Conéctese al sistema de control remoto del robot con el servidor de interfaz del puente C3 en funcionamiento.
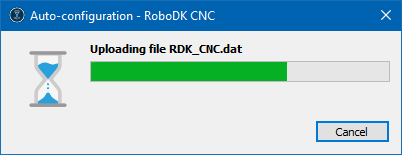
3.Si está ejecutando la aplicación por primera vez o su sistema de control de robots nunca ha utilizado el CNC RoboDK, es necesario realizar una configuración automática antes de comenzar. Ejecútela utilizando el menú Robot➔ Configurar...
4.Abra un archivo de programa CSV generado con el postprocesador CNC RoboDK.
5.Asegúrese de que el robot está listo para funcionar: los accionamientos están encendidos, el modo de funcionamiento deseado y los ajustes de velocidad están configurados.
6.Pulse el botón Inicio para empezar a ejecutar el programa.