Asistente de calibración
Para iniciar el procedimiento de calibración, simplemente seleccione TwinTool➔
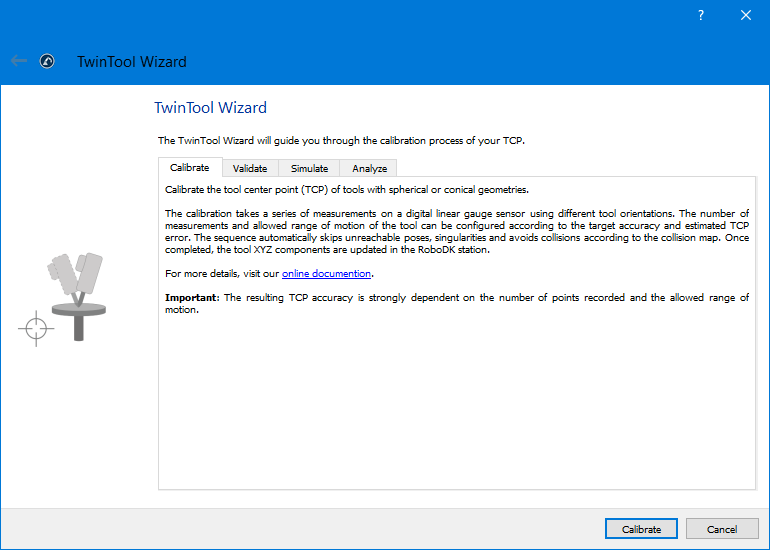
Tras iniciar el asistente, se le guiará a través de las configuraciones


Importante: Se recomienda ejecutar la secuencia de calibración en modo de simulación al menos una vez antes de calibrar en el robot conectado.
Importante: La secuencia simulada puede no coincidir con la secuencia real utilizada para la calibración o la validación. La trayectoria del robot se ajusta automáticamente.
Consejo: Guarde el Objetivo de articulación de la posición del robot en el sensor, utilizando un nombre diferente al de 'Objetivo de calibración'. Podrá reutilizarlo para volver a colocar rápidamente al robot en su posición.
Consejo: Fije el error estimado de la herramienta en 5 mm o menos si ya tiene una buena estimación del TCP. Esto hará que el procedimiento de calibrado sea más rápido.
Consejo: Cambie el rango de articulación en Z y XY para cambiar el rango de movimiento del robot.