Para calibrar la herramienta (TCP) utilizando TwinTool necesita cargar el robot en RoboDK y asegurarse de que el sensor y el robot están conectados. Opcionalmente, puede modelar la célula añadiendo los modelos 3D de los objetos y las herramientas. Esto permitirá evitar automáticamente las colisiones.
1.Cargue el robot:
a.Seleccione Archivo➔ Abrir biblioteca en línea. La biblioteca en línea aparecerá en RoboDK.
b.Utilice los filtros para encontrar su robot.
c.Seleccione Abrir para cargar automáticamente el robot en su estación RoboDK.
d.Otra posibilidad es descargar el archivo del robot directamente de la biblioteca (https://robodk.com/library) y abrir el archivo con RoboDK (el archivo .robot).
2.Conecte el sensor:
a.Conecte el sensor a su ordenador.
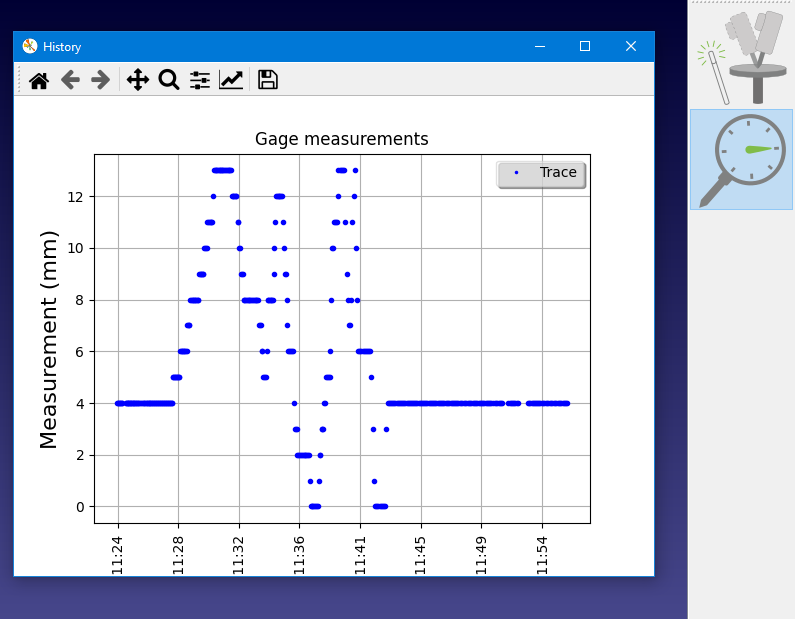
b.Seleccione TwinTool➔ Measure.
c.Asegúrese de que el sensor mide y las mediciones son estables.
Nota: Si no puede conectarse al sensor de inmediato, podrá editar los ajustes de conexión y guardarlos para su uso posterior durante los pasos siguientes.
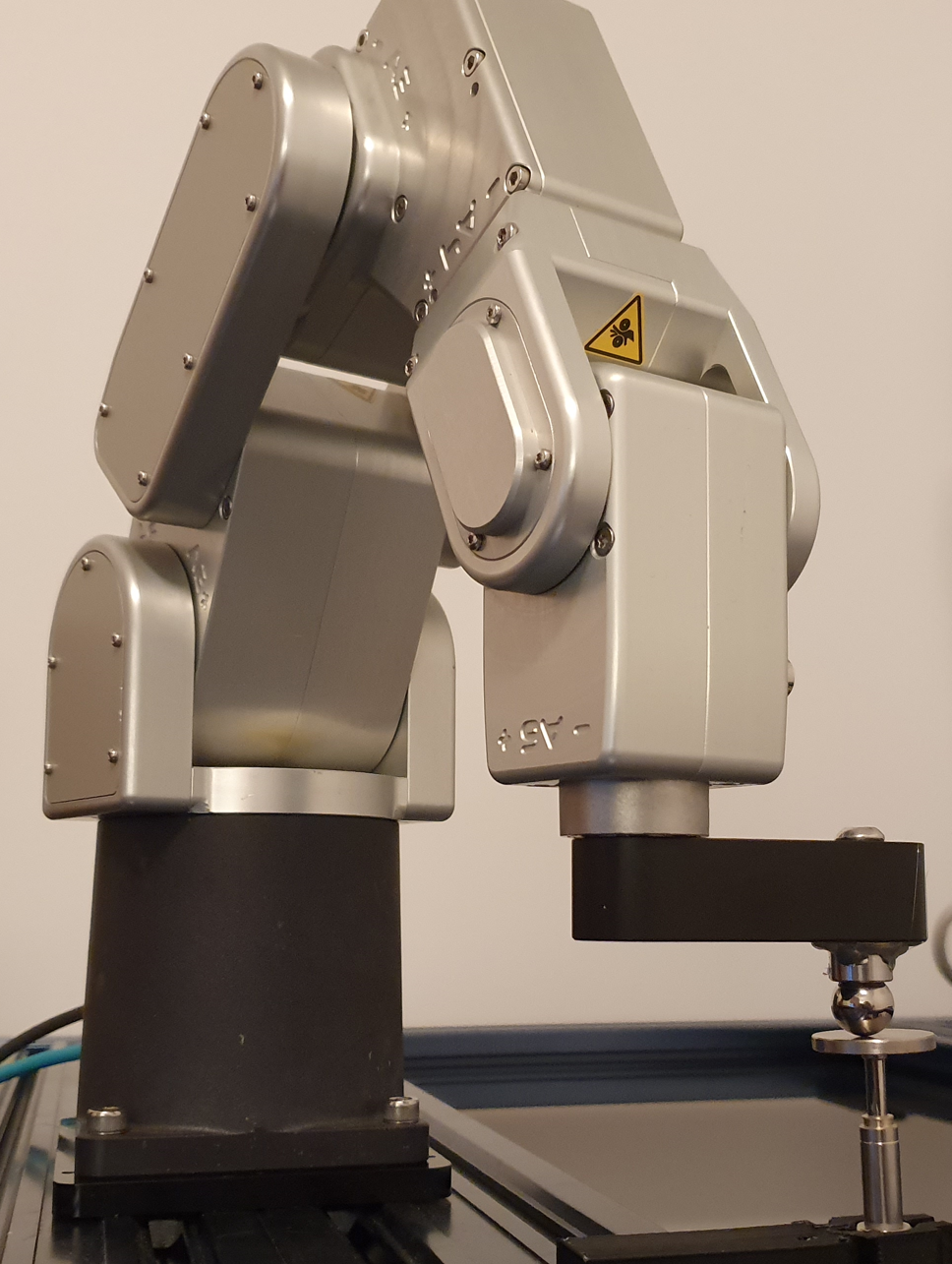
Importante: Asegúrese de que la configuración es lo suficientemente rígida para la calibración asegurándose de que las vibraciones cercanas no alteran las mediciones. Por ejemplo, coloque el robot sobre el sensor e intente crear pequeñas vibraciones (como caminar cerca de la zona del sensor). Las mediciones deben permanecer estables con un ruido inferior a 0,005 mm. Si no es así, se recomienda encarecidamente reforzar el soporte del sensor y/o la base del robot.
3.Conecte el robot:
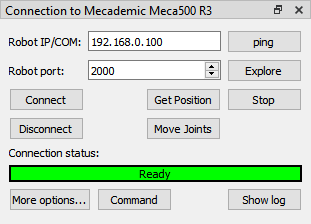
a.Seleccione Conectar➔ Conectar robot.
b.Introduzca la IP y el puerto del robot.
c.Seleccione Conectar.
Nota: Algunos controladores de robot requieren seguir una configuración específica u opciones de software concretas. Más información en la sección de controladores de robot.
4.Seleccione Obtener posición en el panel de conexión del robot. Este paso actualizará la posición del robot en RoboDK.
Configuración personalizada
Importante: Se recomienda modelar en 3D cualquier objeto que pueda causar colisiones con el robot o la herramienta. Si tiene una herramienta que puede causar colisiones con el robot (o cualquier otra colisión potencial) es mejor proceder con una configuración personalizada como se describe en la siguiente sección.
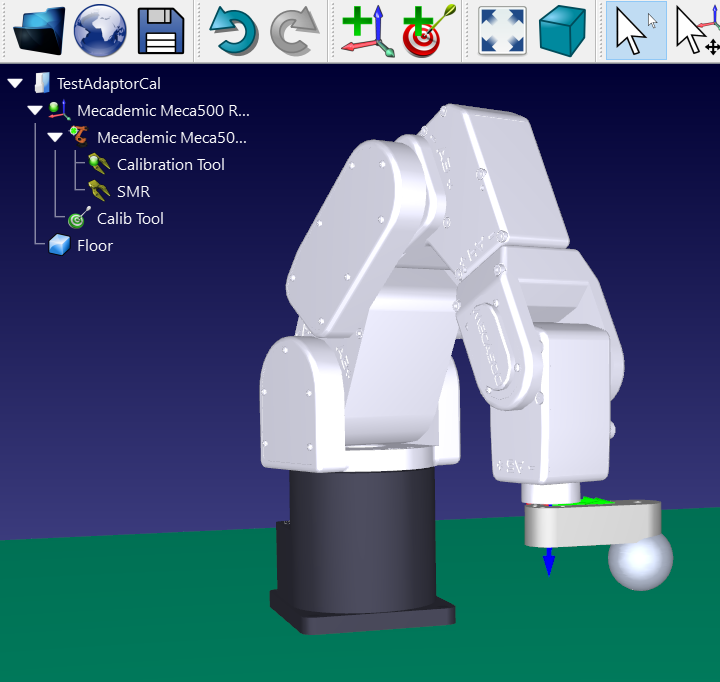
Opcionalmente, puede seguir estos pasos para modelar correctamente el entorno 3D de su célula.
1.Cargue el modelo 3D de su herramienta y cree una herramienta en RoboDK. Más información en la sección crear herramienta.
2.Cargue cualquier archivo 3D para modelar la célula. Puede cargar archivos 3D STEP, IGES, STL. Más información en la sección de introducción.
Nota: Se recomienda encarecidamente modelar correctamente la célula para evitar colisiones.
Consejo: Si dispone de una buena estimación del punto central de la herramienta, puede configurarla en RoboDK y actualizar la herramienta estimada para disponer de un procedimiento de calibrado más rápido.
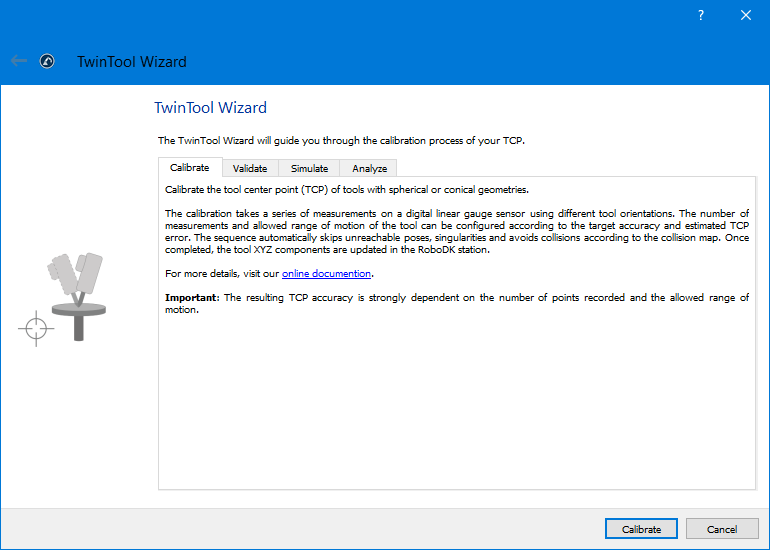
Asistente de calibración
Para iniciar el procedimiento de calibración, simplemente seleccione TwinTool➔ Asistente TwinTool.
Tras iniciar el asistente, se le guiará a través de las configuraciones Calibración, Validación o Simulación. Esto incluye la configuración de la conexión con el sensor, la garantía de un estado válido del robot y la revisión de los parámetros clave. Siga los pasos que aparecen en pantalla y consulte los consejos de la herramienta si necesita detalles adicionales.
Importante: Se recomienda ejecutar la secuencia de calibración en modo de simulación al menos una vez antes de calibrar en el robot conectado.
Importante: La secuencia simulada puede no coincidir con la secuencia real utilizada para la calibración o la validación. La trayectoria del robot se ajusta automáticamente.
Consejo: Guarde el Objetivo de articulación de la posición del robot en el sensor, utilizando un nombre diferente al de 'Objetivo de calibración'. Podrá reutilizarlo para volver a colocar rápidamente al robot en su posición.
Consejo: Fije el error estimado de la herramienta en 5 mm o menos si ya tiene una buena estimación del TCP. Esto hará que el procedimiento de calibrado sea más rápido.
Consejo: Cambie el rango de articulación en Z y XY para cambiar el rango de movimiento del robot.