Configuración personalizada
Importante: Se recomienda modelar en 3D cualquier objeto que pueda causar colisiones con el robot o la herramienta. Si tiene una herramienta que puede causar colisiones con el robot (o cualquier otra colisión potencial) es mejor proceder con una configuración personalizada como se describe en la siguiente sección.
Opcionalmente, puede seguir estos pasos para modelar correctamente el entorno 3D de su célula.
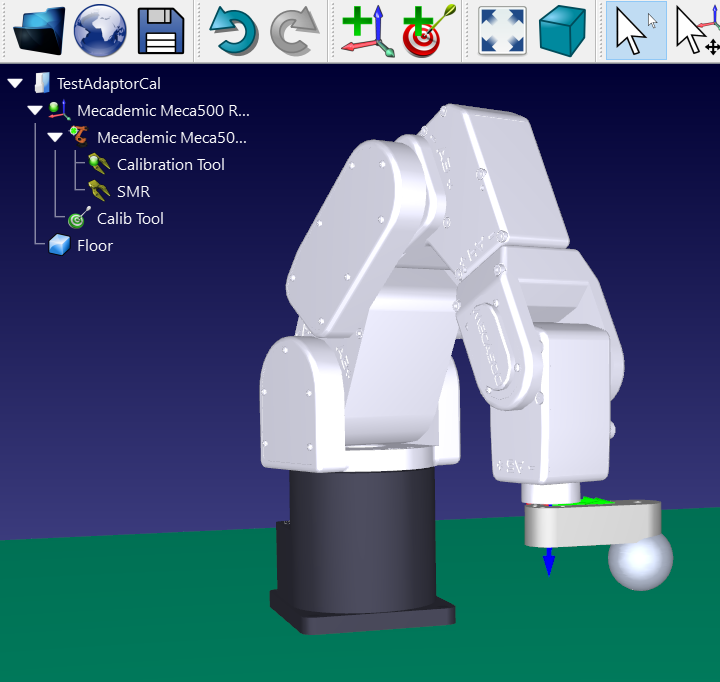
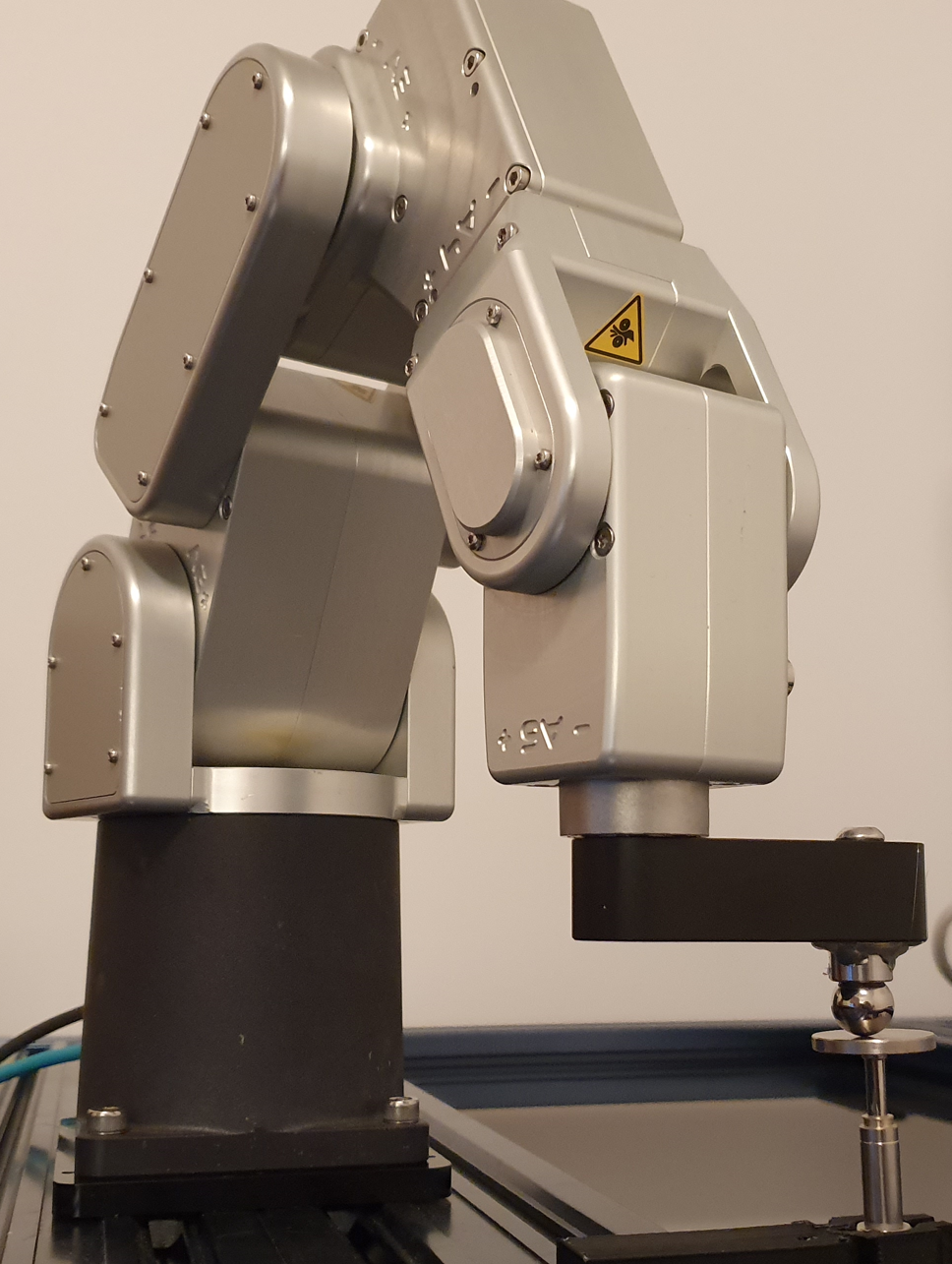
1.Cargue el modelo 3D de su herramienta y cree una herramienta en RoboDK. Más información en la sección crear herramienta.
2.Cargue cualquier archivo 3D para modelar la célula. Puede cargar archivos 3D STEP, IGES, STL. Más información en la sección de introducción.
Nota: Se recomienda encarecidamente modelar correctamente la célula para evitar colisiones.
Consejo: Si dispone de una buena estimación del punto central de la herramienta, puede configurarla en RoboDK y actualizar la herramienta estimada para disponer de un procedimiento de calibrado más rápido.