Requisitos
Debe instalar la aplicación RoboDK TwinTool y disponer de un sensor compatible para realizar la calibración automática de la herramienta.
Asegúrese de tener lo siguiente:
1.Uno o varios brazos robóticos.
2.Un reloj comparador compatible (también conocido como LVDT o calibre lineal).
3.El software RoboDK debe estar instalado y se debe disponer de una licencia adecuada para la calibración automática del robot.
4.Necesita controladores de robot compatibles para su controlador de robot.
5.Instale la aplicación RoboDK TwinTool:
a.Descargue la aplicación TwinTool de RoboDK (póngase en contacto con RoboDK para obtener un enlace de descarga)
b.Haga doble clic en el archivo para instalar la aplicación y abrirla en RoboDK.
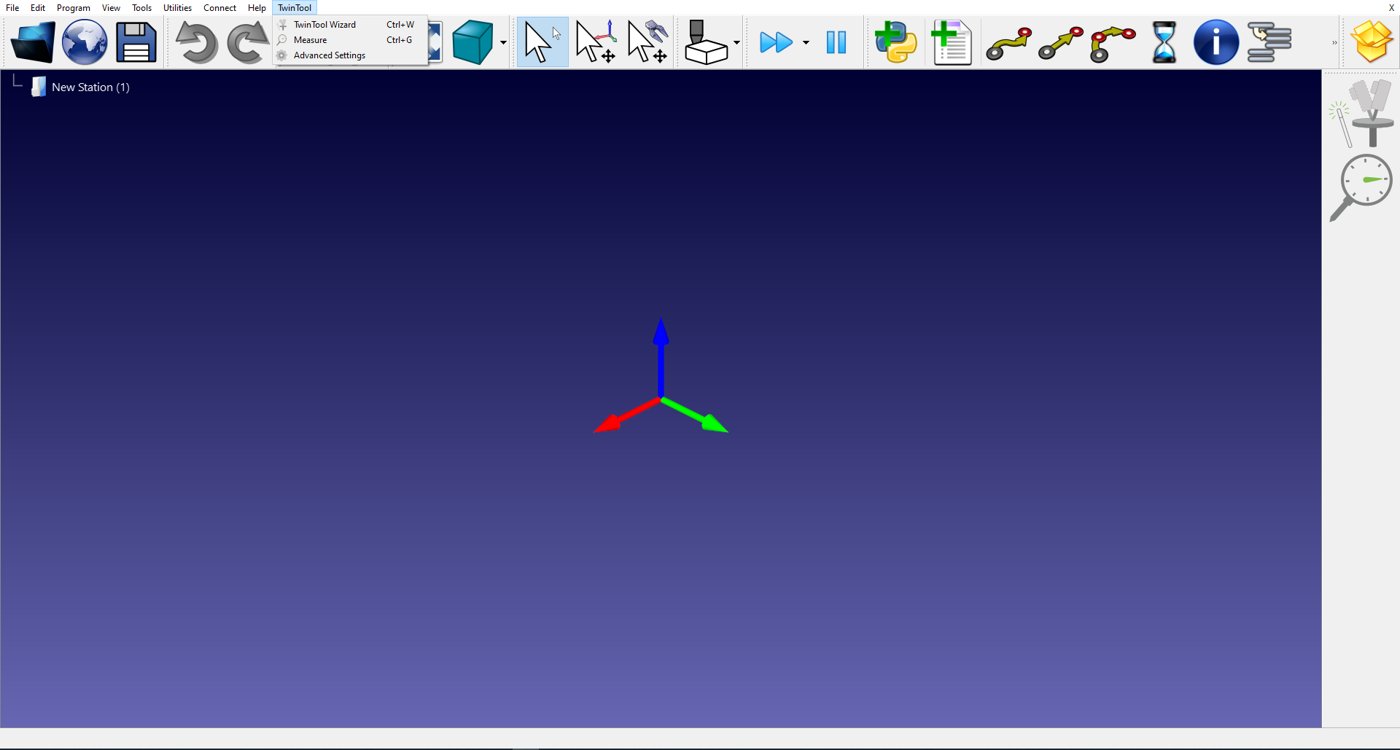
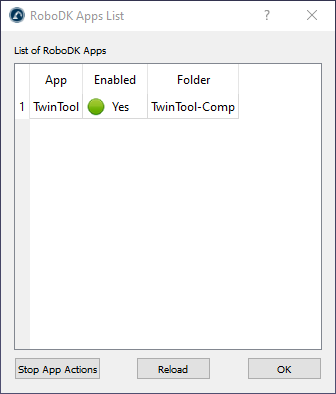
c.Seleccione Herramientas➔ Apps y haga doble clic en TwinTool para ver la barra de herramientas y el menú de TwinTool
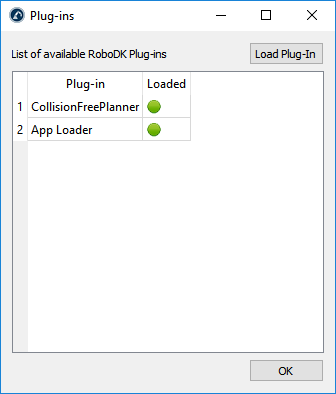
Si no puede ver la aplicación TwinTool deberá cerrar RoboDK e iniciar RoboDK de nuevo con privilegios de administrador para instalar correctamente la aplicación.