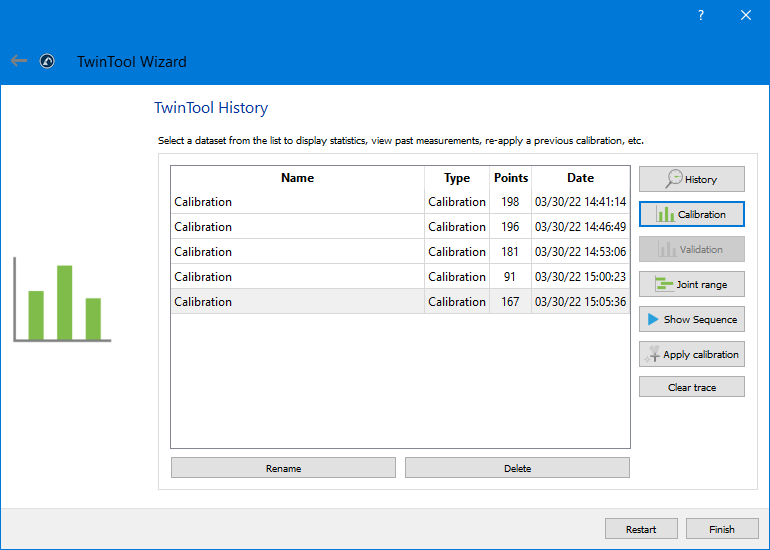
Una vez completada la secuencia de calibrado, se le dirigirá a la pestaña Analyze del asistente. Desde allí, podrá visualizar las calibraciones y validaciones actuales y anteriores, eliminar o volver a aplicar calibraciones, etc.
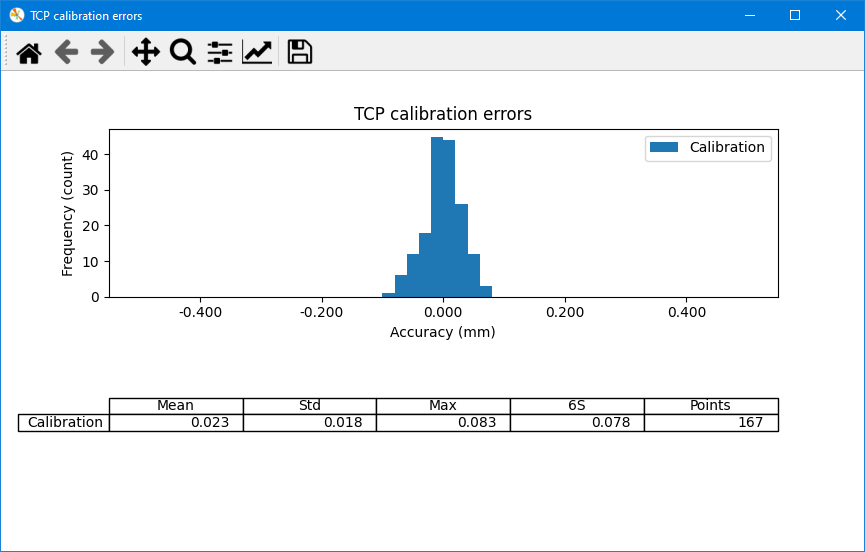
Al pulsar el botón Calibración, verá un gráfico que muestra los resultados de la calibración. El punto central de la herramienta (TCP) se calcula utilizando la cinemática nominal del robot.
Nota: Seleccione TwinTool➔ TwinTool Wizard para iniciar de nuevo la secuencia de calibrado con un conjunto de puntos diferente (el sensor no debe moverse).
Consejo: Si desea obtener los mejores resultados de precisión es importante calibrar la herramienta con diferentes configuraciones del robot. Por ejemplo, si ejecuta primero una secuencia de calibración con el robot en posición de volteo (articulación 5 negativa), puede enseñar un nuevo objetivo que tenga una posición de no volteo (articulación 5 positiva) y ejecutar de nuevo la secuencia de calibración.