Validación
Una vez que haya ejecutado la secuencia de calibración, puede realizar algunas pruebas de validación. Estas pruebas de validación pueden realizarse en la misma ubicación del sensor o en ubicaciones diferentes.
Importante: No es posible combinar varias secuencias de calibrado realizadas en distintas ubicaciones del calibre lineal. Puede calibrar el robot más de una vez en la misma ubicación y todos los datos recogidos en la misma ubicación del sensor se utilizarán para la calibración.
Validar la calibración de la herramienta
Seleccione

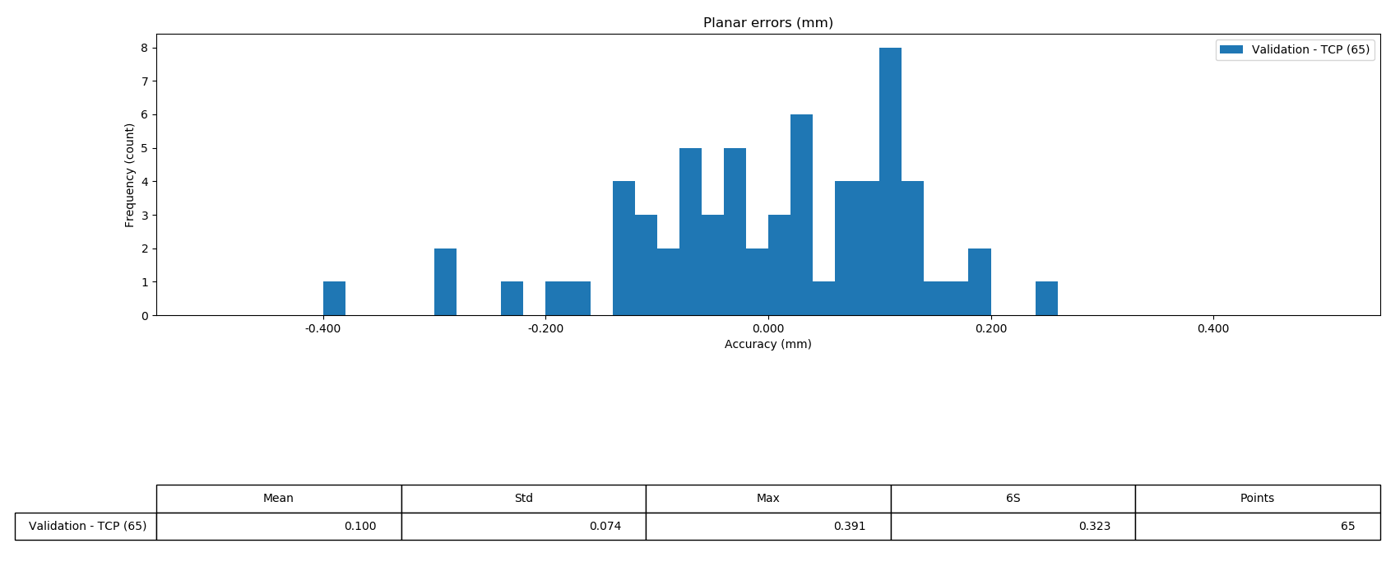
Seleccione Validación para visualizar un resumen y algunas estadísticas sobre los resultados. Estas estadísticas corresponden a los errores planares detectados por el sensor.
Consejo: Realizar más mediciones para la calibración puede mejorar notablemente los resultados de la misma. Puede cambiar la medida del objetivo del sensor (por ejemplo, utilizar un objetivo de 8 mm después del objetivo predeterminado de 4 mm para una segunda calibración). También puede cambiar la configuración del robot para realizar mediciones en el mismo punto pero con diferentes ángulos de articulación (por ejemplo, utilizando las configuraciones con y sin giro).