RoboDK TwinTool
Introducción
Con la calibración TwinTool de RoboDK puede calibrar automáticamente el punto central de la herramienta (TCP). Los robots industriales son altamente repetibles, pero no precisos. Por lo tanto, la precisión de un robot industrial puede mejorarse mediante la calibración del robot y la herramienta. Sin calibración, la precisión del robot depende en gran medida de la marca y el modelo del robot.
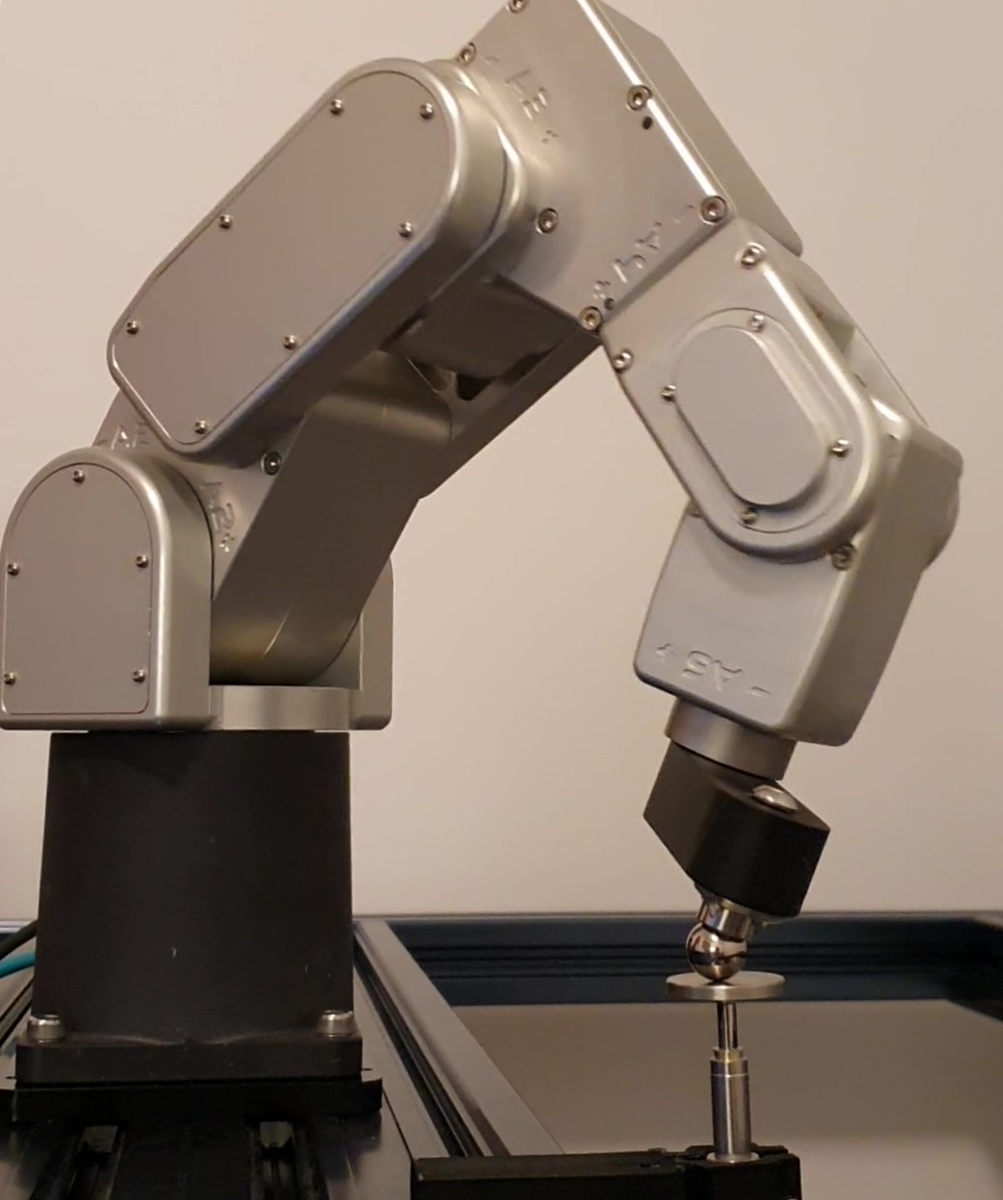

RoboDK TwinTool puede utilizarse para calibrar y validar el punto central de la herramienta (TCP) . La TwinTool puede calibrar con precisión el TCP para herramientas con geometrías esféricas o cónicas.
1.Herramientas esféricas➔ El centro de la herramienta está calibrado
2.Herramientas cónicas➔ La punta de la herramienta está calibrada
Requisitos
Debe instalar la aplicación RoboDK TwinTool y disponer de un sensor compatible para realizar la calibración automática de la herramienta.
Asegúrese de tener lo siguiente:
1.Uno o varios brazos robóticos.
2.Un reloj comparador compatible (también conocido como LVDT o calibre lineal).
3.El software RoboDK debe estar instalado y se debe disponer de una licencia adecuada para la calibración automática del robot.
4.Necesita controladores de robot compatibles para su controlador de robot.
5.Instale la aplicación RoboDK TwinTool:
a.Descargue la aplicación TwinTool de RoboDK (póngase en contacto con RoboDK para obtener un enlace de descarga)
b.Haga doble clic en el archivo para instalar la aplicación y abrirla en RoboDK.
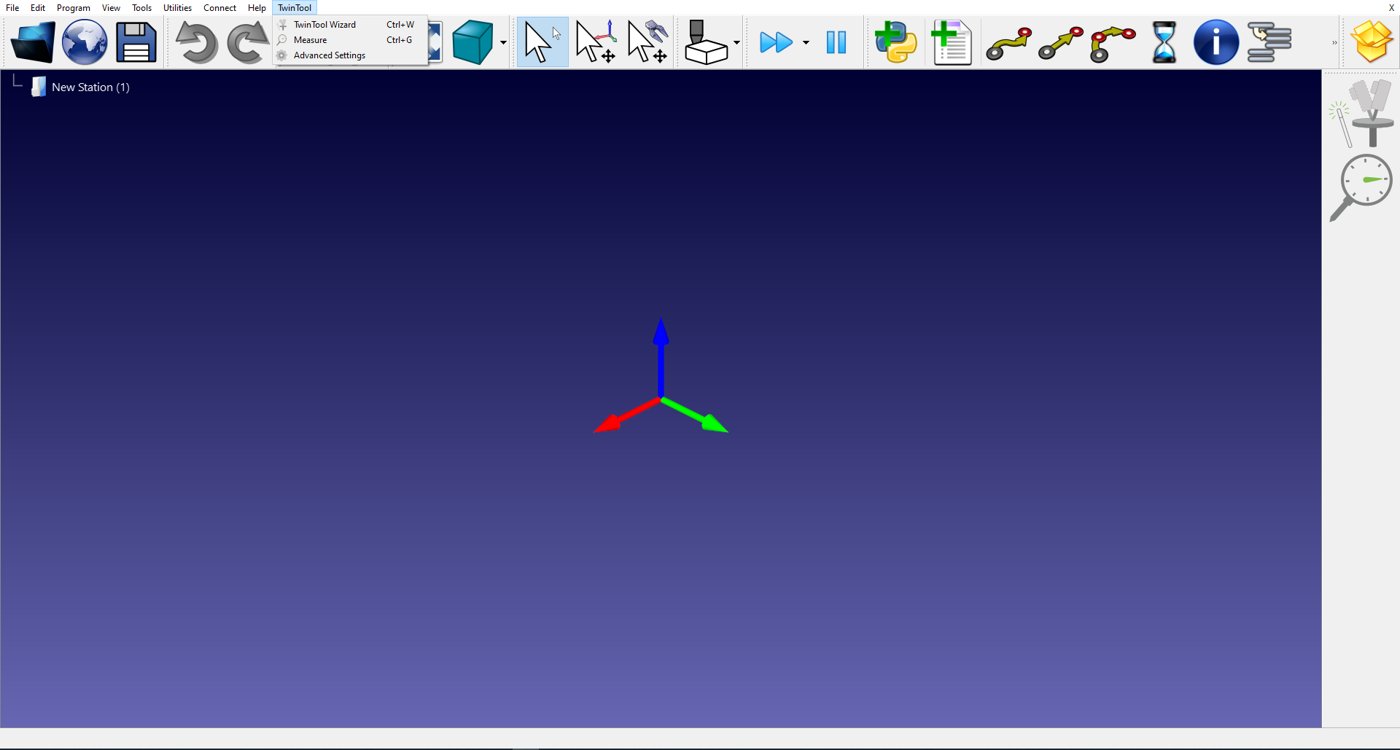
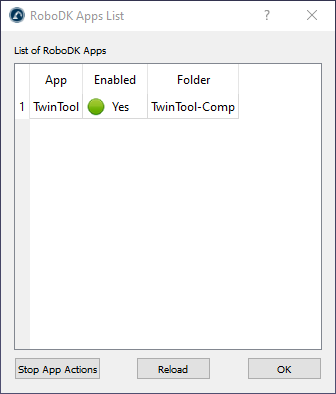
c.Seleccione Herramientas➔ Apps y haga doble clic en TwinTool para ver la barra de herramientas y el menú de TwinTool
Si no puede ver la aplicación TwinTool deberá cerrar RoboDK e iniciar RoboDK de nuevo con privilegios de administrador para instalar correctamente la aplicación.
Sensor de calibre lineal
RoboDK TwinTool es compatible con múltiples sensores de galgas lineales, como Keyence, Mitutoyo, Sylvac y otros. Algunos protocolos de comunicación incluyen USB, Ehternet/IP y RS232. El precio aproximado de un sensor de galgas lineales de grado industrial es de 1.500,00 euros.
El sensor del calibre lineal debe tener una precisión de 0,005 mm o superior y un recorrido de 10 mm o más. Se recomienda que tenga una frecuencia de medición de 50 muestras por segundo o más. Este sensor no es suministrado ni vendido por RoboDK. Le recomendamos que se ponga en contacto con su distribuidor local para que le suministre este sensor necesario para utilizar RoboDK TwinTool.
La siguiente lista muestra un ejemplo de pedido de un calibre lineal Keyence:
●Keyence GT2-P12 - Calibre tipo lápiz
●GT2-UB1 - Unidad de conexión USB
●OP-87716 - Prolongación de cable
●OP-76875 - Soporte de montaje sugerido para el calibrador
●Se necesita un punto de contacto plano de 25 mm con rosca M2,5x0,25 (no suministrado por Keyence)
La siguiente lista muestra un ejemplo de pedido de un calibre lineal Mitutoyo:
●Mitutoyo 542-191 - Calibre LG 100
●Mitutoyo 542-081A - Contador EJ + CA
●Mitutoyo 21HZA149 - Interfaz USB (también admite RS232)
●Se necesita una punta de contacto plana de 25 mm con rosca M2,5x0,25 (no suministrada por Mitutoyo)
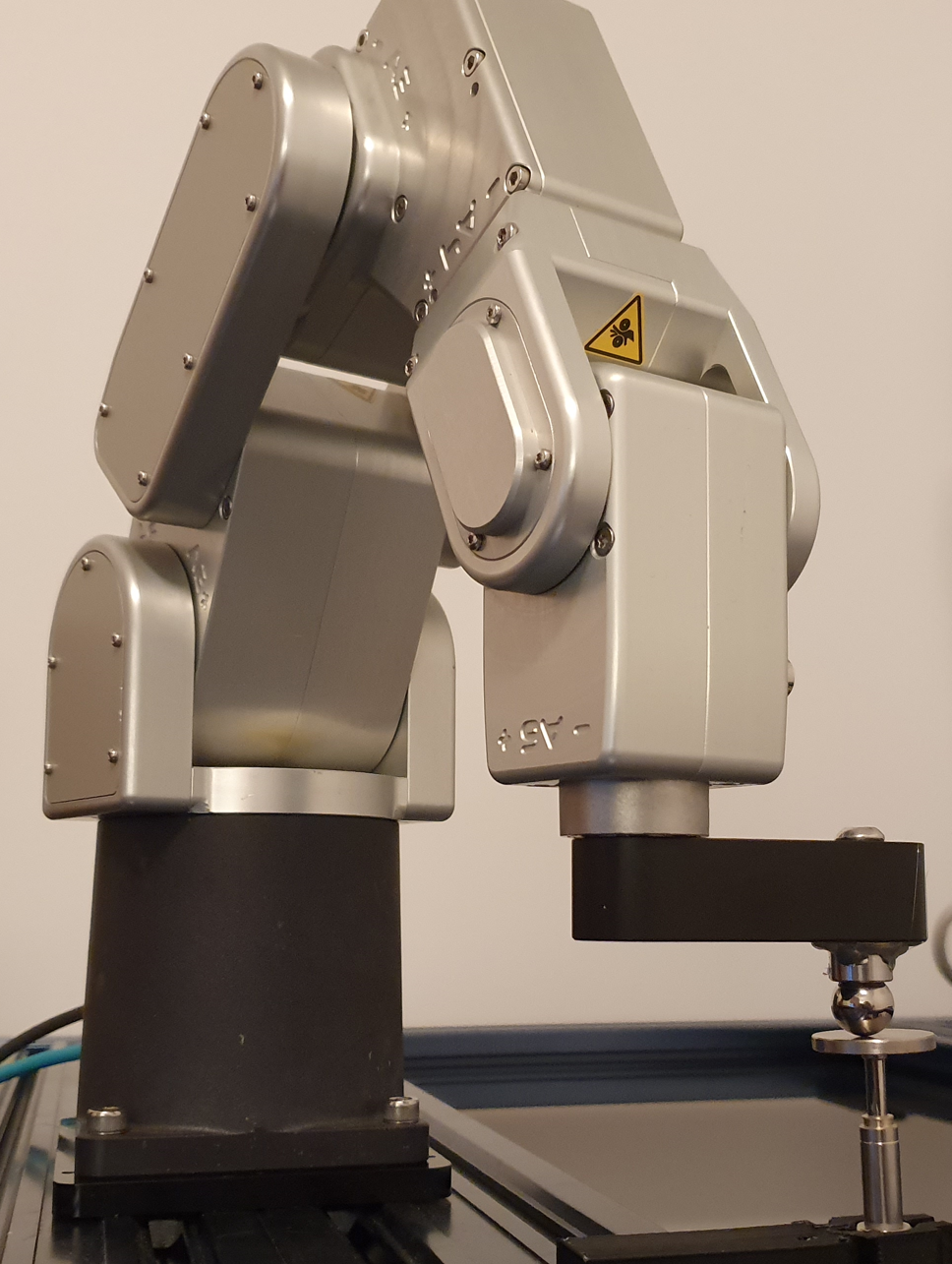
Configuración de la calibración
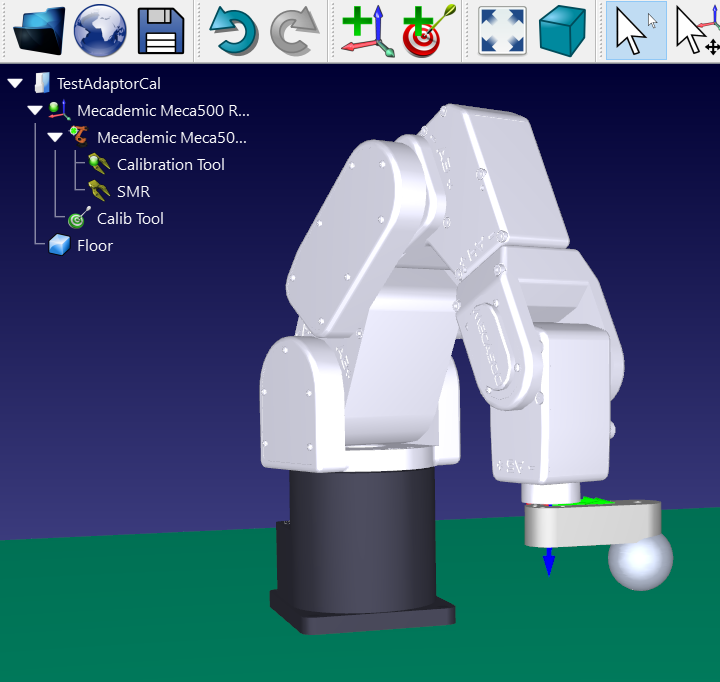
Para calibrar la herramienta (TCP) utilizando TwinTool necesita cargar el robot en RoboDK y asegurarse de que el sensor y el robot están conectados. Opcionalmente, puede modelar la célula añadiendo los modelos 3D de los objetos y las herramientas. Esto permitirá evitar automáticamente las colisiones.
1.Cargue el robot:
a.Seleccione Archivo➔ Abrir biblioteca en línea. La biblioteca en línea aparecerá en RoboDK.
b.Utilice los filtros para encontrar su robot.
c.Seleccione Abrir para cargar automáticamente el robot en su estación RoboDK.
d.Otra posibilidad es descargar el archivo del robot directamente de la biblioteca (https://robodk.com/library) y abrir el archivo con RoboDK (el archivo .robot).
2.Conecte el sensor:
a.Conecte el sensor a su ordenador.
b.Seleccione TwinTool➔
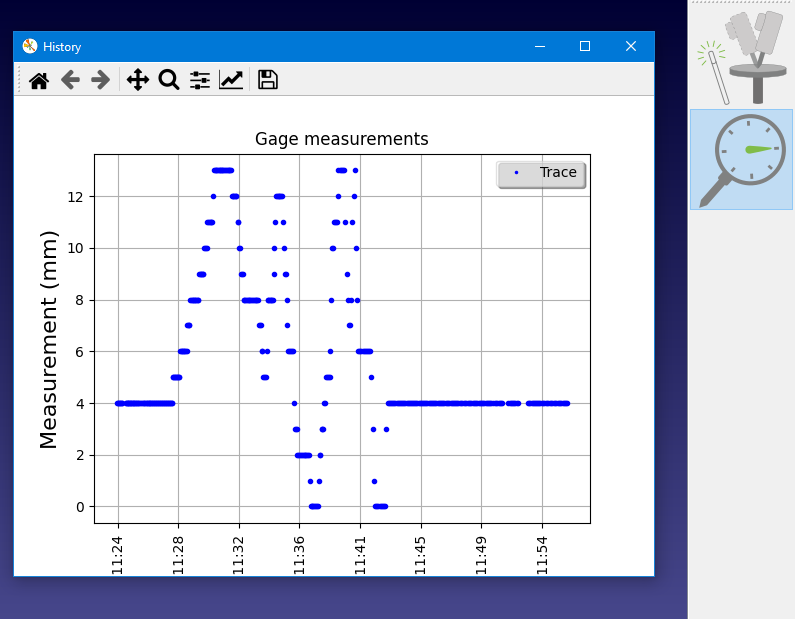
c.Asegúrese de que el sensor mide y las mediciones son estables.
3.Conecte el robot:
a.Seleccione Conectar➔ Conectar robot.
b.Introduzca la IP y el puerto del robot.
c.Seleccione Conectar.
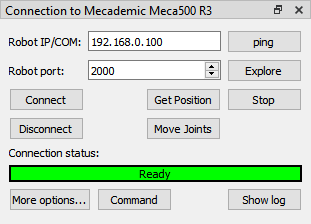
4.Seleccione Obtener posición en el panel de conexión del robot. Este paso actualizará la posición del robot en RoboDK.
Configuración personalizada
Opcionalmente, puede seguir estos pasos para modelar correctamente el entorno 3D de su célula.
1.Cargue el modelo 3D de su herramienta y cree una herramienta en RoboDK. Más información en la sección crear herramienta.
2.Cargue cualquier archivo 3D para modelar la célula. Puede cargar archivos 3D STEP, IGES, STL. Más información en la sección de introducción.
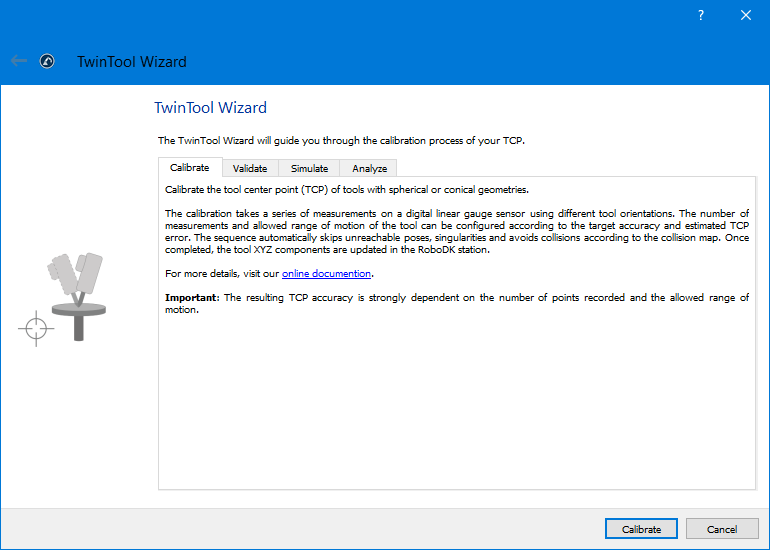
Asistente de calibración
Para iniciar el procedimiento de calibración, simplemente seleccione TwinTool➔
Tras iniciar el asistente, se le guiará a través de las configuraciones


Resultados de la calibración
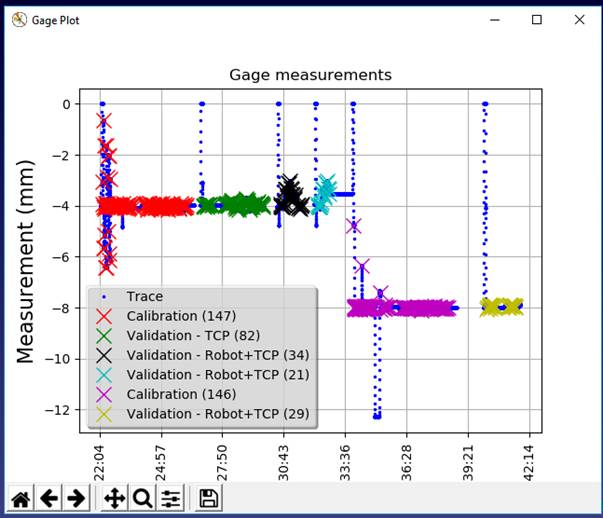
Una vez completada la secuencia de calibrado, se le dirigirá a la pestaña
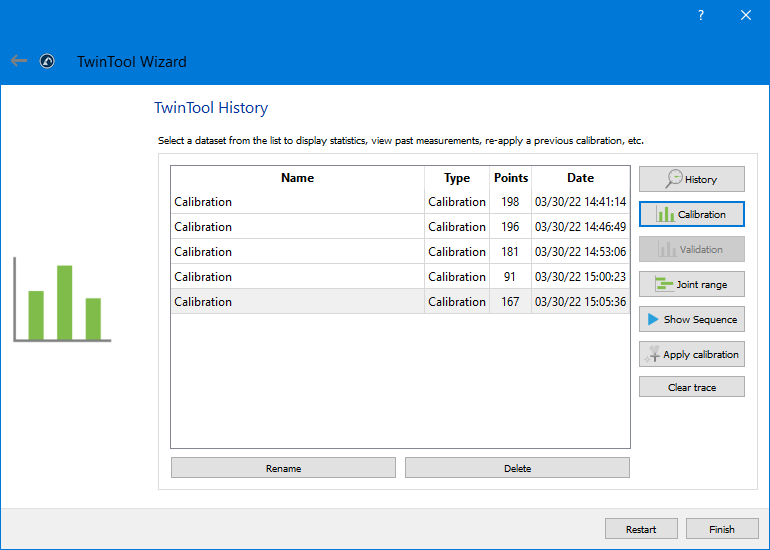
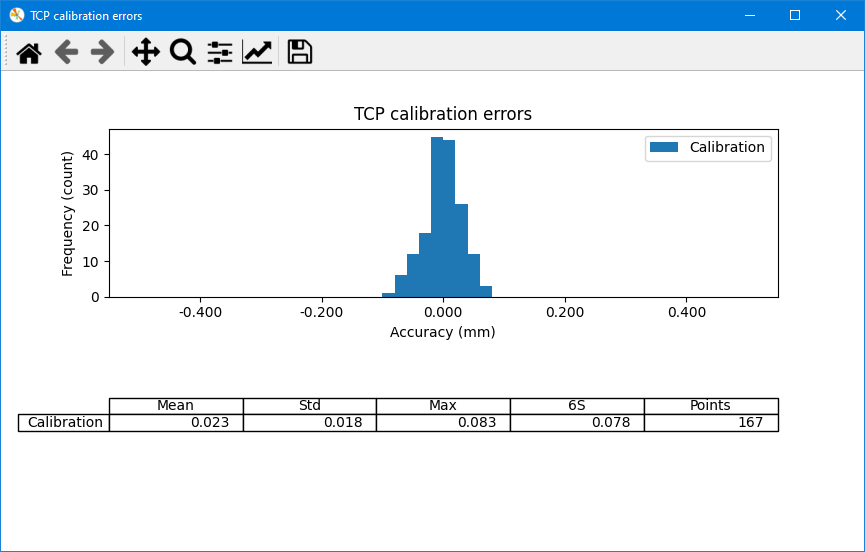
Al pulsar el botón Calibración, verá un gráfico que muestra los resultados de la calibración. El punto central de la herramienta (TCP) se calcula utilizando la cinemática nominal del robot.
Validación
Una vez que haya ejecutado la secuencia de calibración, puede realizar algunas pruebas de validación. Estas pruebas de validación pueden realizarse en la misma ubicación del sensor o en ubicaciones diferentes.
Validar la calibración de la herramienta
Seleccione
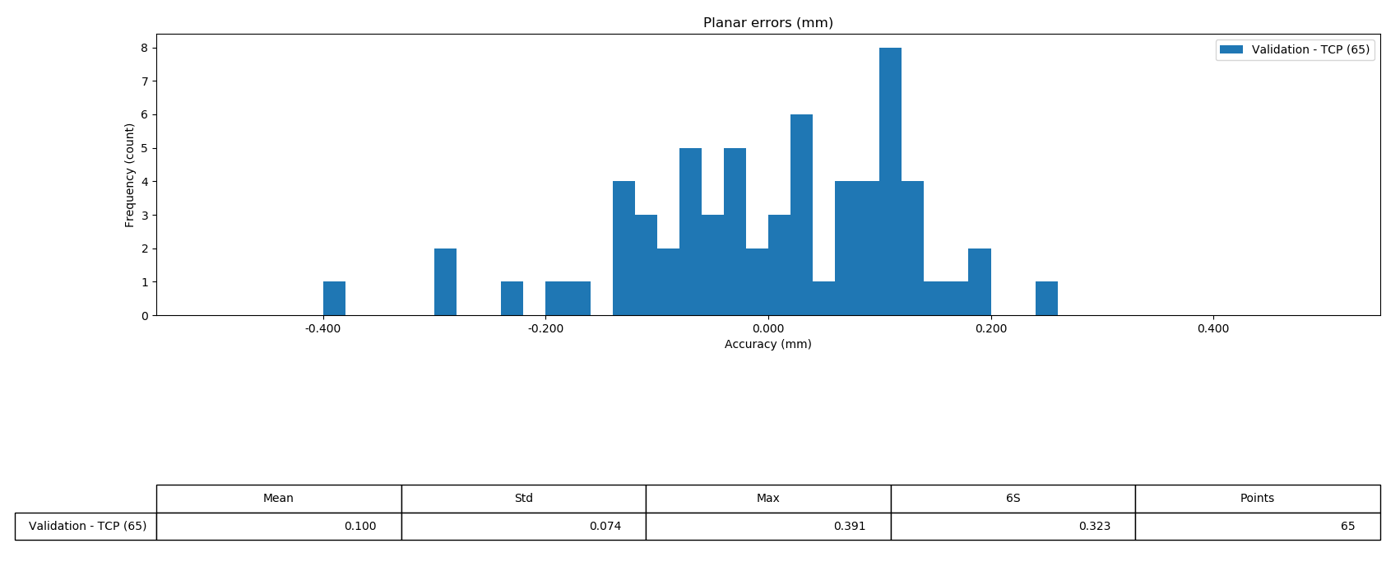
Seleccione Validación para visualizar un resumen y algunas estadísticas sobre los resultados. Estas estadísticas corresponden a los errores planares detectados por el sensor.
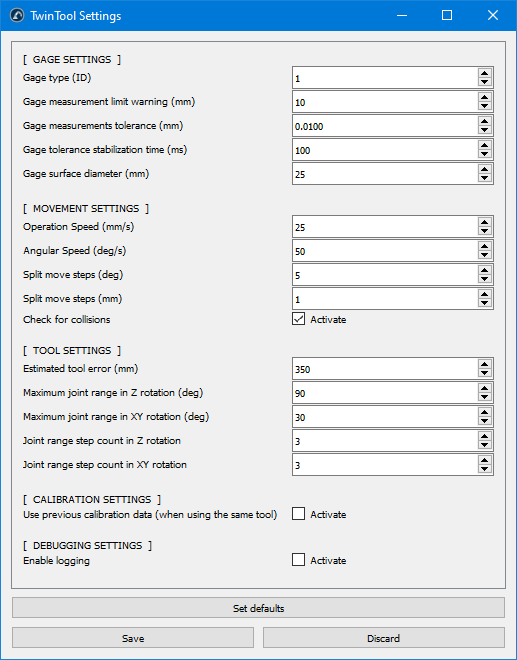
Ajustes
Esta sección describe ajustes y opciones adicionales que puede modificar para personalizar mejor sus calibraciones y comprobar la precisión del robot.
Ajustes de calibración
Seleccione TwinTool➔ Ajustes avanzados para abrir la lista completa de ajustes avanzados. La mayoría de estos ajustes se solicitan y configuran a través del Asistente.