Conectar con el tracker
La IP del tracker es necesaria para configurar correctamente la comunicación en RoboDK. Asegúrese de que no se está ejecutando VXelements y siga estos pasos para comprobar la comunicación con el tracker:
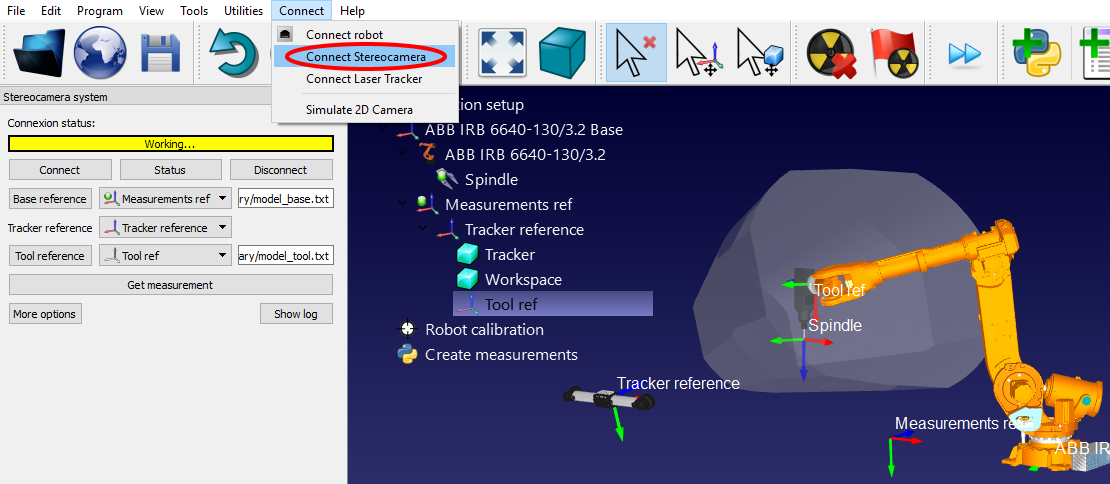
a.Seleccione el menú “Conectar➔Conectar Cámara Estéreo”. Una nueva ventana se abrirá.
b.Entrar en el “modelo de base” y el “modelo de herramientas”, como archivos de texto (generados en la sección anterior). Estas son las posiciones de los objetivos que definen el sistema de coordenadas y la herramienta sistema, respectivamente.
c.Seleccione el botón “Conectar”.
d.Cuando la conexión tenga éxito, debemos proporcionar los modelos de Base y de Herramienta como archivos de texto (.txt).
Verá que una versión integrada de VXelements se inicia y, después de unos segundos, debería ver un mensaje verde que muestra “Listo” si la conexión es exitosa. Las ventanas VXelements pueden ser cerrardas y la conexión permanecerá activa. Si la conexión no tiene éxito hay que asegurarse de que no hay procesos VXelements ejecutándose en segundo plano en la barra de tareas de Windows o el administrador de tareas (seleccionar CTRL+ALT+DEL para obligar a detener el proceso de “VXelementsApiImplementation”) y, a continuación, seleccione Conectar en RoboDK para intentar de nuevo.