Configuración de calibración del robot
Se requieren dos objetos: un objeto de la herramienta (sostenida por el robot) y un objeto de referencia base (estática en la célula). El tracker debe ser capaz de ver el objeto de la herramienta y el objeto de referencia de base para cada medición. Estos objetos también se conocen como “modelos” (en VXelements) y se definen por un conjunto de objetivos unidos a los objetos de la herramienta y del sistema de coordenadas. El tracker rastrea la posición de estos objetivos proporcionando el sistema de coordenadas de estos objetos como una medición con respecto al tracker. RoboDK toma cada medición como la posición de la herramienta con respecto al sistema de coordenadas base, por lo que el tracker se puede mover sin alterar las mediciones.
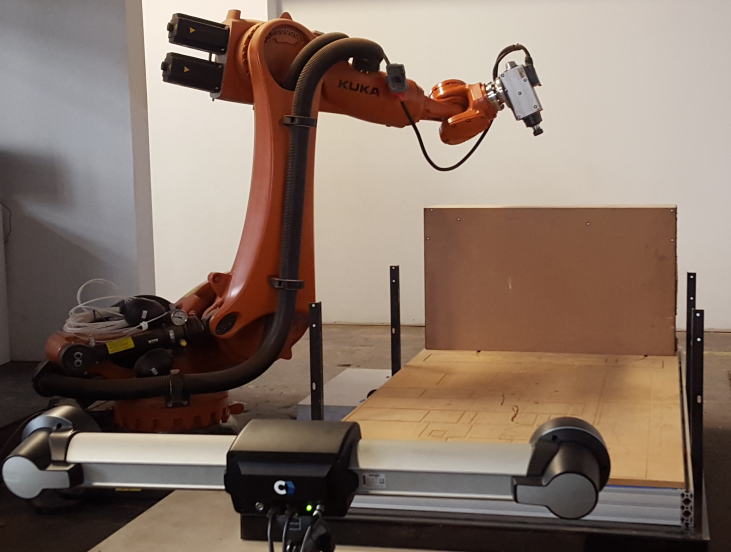
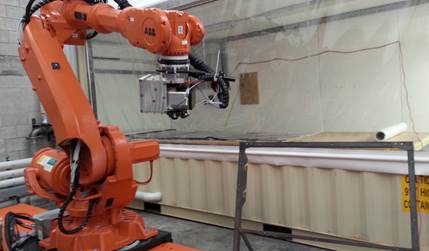
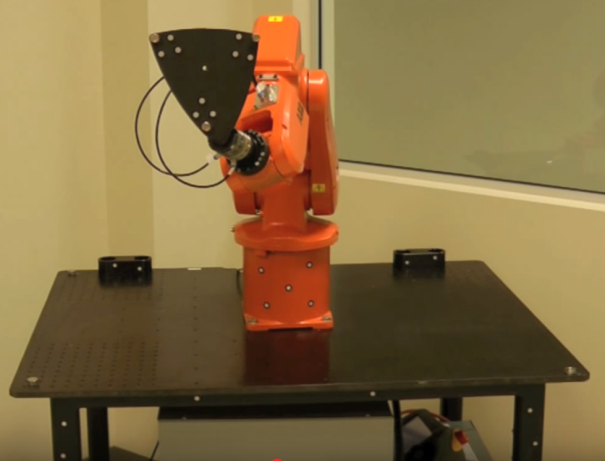
Se requiere adjuntar un grupo de objetivos a la herramienta y al sistema de coordenadas, respectivamente, para permitir el seguimiento de estos objetos correctamente. Las siguientes imágenes muestran algunos ejemplos de configuraciones adecuadas:

Las siguientes subsecciones deben llevarse a cabo de forma secuencial para estar listo para comenzar a tomar medidas. Por último, será necesario conectar el tracker y el robot al computador para automatizar el procedimiento de toma de medidas.
Sistema de coordenadas de la sonda
En primer lugar, se requieren dos modelos: un modelo de la herramienta y un modelo del sistema de coordenadas base. Un modelo es un objeto definido como una lista de puntos (coordenadas X, Y, Z) que corresponden a los objetivos con respecto a la referencia de modelo (sistema de coordenadas base o de herramienta). Podemos utilizar opcionalmente HandyProbe para colocar el sistema de coordenadas donde se desee.
Debemos seguir estos pasos dos veces para definir los modelos de herramientas y bases:
1.Inicie VXelements y conecte el tracker. Calibre el tracker así como el HandyProbe si se requiere.
2.Seleccione Modelos de Seguimiento desde el árbol izquierdo en VXelements y seleccione Detectar modelo. Seleccione los objetivos que correspondan con un modelo (herramienta u objeto) y seleccione “Aceptar”.

3.El sistema de coordenadas del objeto se puede colocar en una posición específica con respecto a ciertas características del objeto. Este paso es opcional, pero muy recomendable si tenemos que colocar con precisión las características del TCP con respecto a la brida de montaje del robot. Por ejemplo, podríamos colocar con precisión el eje Z de la herramienta a lo largo de un cilindro de referencia que es utilizado como el eje del husillo.
Para mover correctamente el sistema de coordenadas del objeto debemos usar HandyProbe y traer estas características en la sesión virtual de VXelements. El modelo que se utiliza debe ser definido como el modelo de posicionamiento de manera que las características se prueben con respecto a este modelo. Es posible para sondear puntos, líneas, planos, cilindros, conos y definir los sistemas de coordenadas con respecto a estas características.
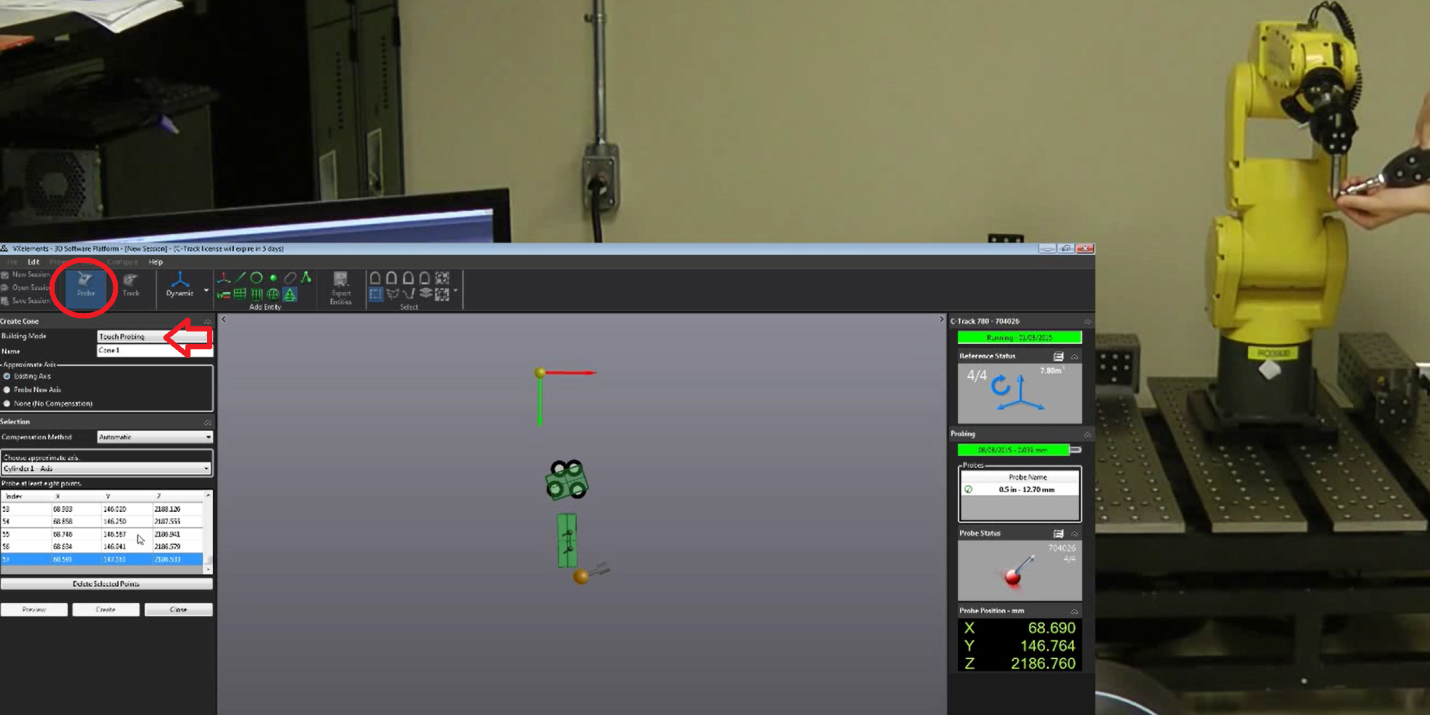
Cuando terminemos podemos exportar el modelo como un archivo txt. Debemos ver los objetivos en el archivo de texto como una lista de puntos XYZ.
Conectar con el tracker
La IP del tracker es necesaria para configurar correctamente la comunicación en RoboDK. Asegúrese de que no se está ejecutando VXelements y siga estos pasos para comprobar la comunicación con el tracker:
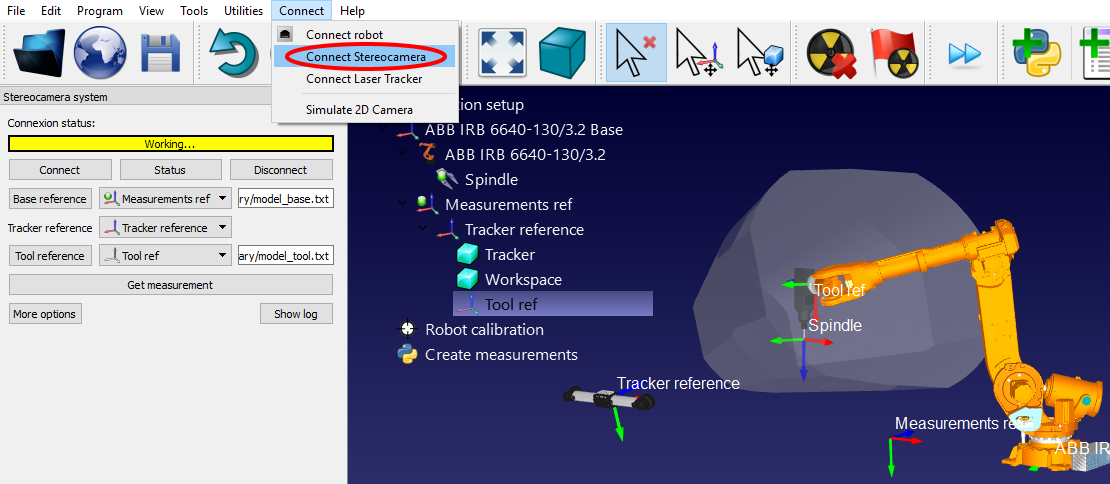
a.Seleccione el menú “Conectar➔Conectar Cámara Estéreo”. Una nueva ventana se abrirá.
b.Entrar en el “modelo de base” y el “modelo de herramientas”, como archivos de texto (generados en la sección anterior). Estas son las posiciones de los objetivos que definen el sistema de coordenadas y la herramienta sistema, respectivamente.
c.Seleccione el botón “Conectar”.
d.Cuando la conexión tenga éxito, debemos proporcionar los modelos de Base y de Herramienta como archivos de texto (.txt).
Verá que una versión integrada de VXelements se inicia y, después de unos segundos, debería ver un mensaje verde que muestra “Listo” si la conexión es exitosa. Las ventanas VXelements pueden ser cerrardas y la conexión permanecerá activa. Si la conexión no tiene éxito hay que asegurarse de que no hay procesos VXelements ejecutándose en segundo plano en la barra de tareas de Windows o el administrador de tareas (seleccionar CTRL+ALT+DEL para obligar a detener el proceso de “VXelementsApiImplementation”) y, a continuación, seleccione Conectar en RoboDK para intentar de nuevo.
Conectar con el robot
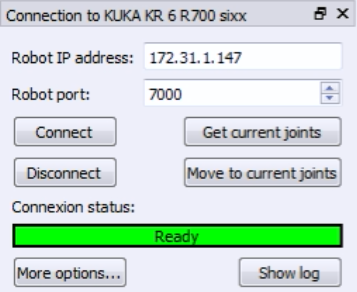
La IP del robot (o el número de puerto COM para conexiones RS232) es necesaria para configurar correctamente la comunicación con RoboDK. Siga estos pasos para comprobar la comunicación con el robot:
1.Seleccione Conectar➔Conectar robot. Una ventana nueva aparecerá.
2.Establecezca la IP y el puerto del robot (o el puerto COM si la conexión es a través de RS232).
3.Haga clic en el botón Conectar.
4.Consulte el apéndice en caso de problemas.
Si la conexión es exitosa se debería ver un mensaje verde mostrando Listo. La posición del robot virtual debe coincidir exactamente con la posición del robot real si seleccionamos Obtener articulaciones actuales. Alternativamente, seleccionar Mover a articulaciones actuales para mover el robot a la posición actual establecida en el simulador. La ventana se puede cerrar y la conexión permanecerá activa.