Dominio del robot
Una vez que el robot ha sido calibrado, usualmente necesitamos RoboDK para filtrar los programas, por lo tanto, es requerida una licencia RoboDK (una licencia básica OLP es suficiente para generar programas precisos de robot una vez que el robot haya sido calibrado). Filtrar un programa significa que los objetivos en un programa son alterados/optimizados para mejorar la precisión del robot, teniendo en cuenta todos los parámetros de calibración (alrededor de 30 parámetros).
Alternativamente, podemos calibrar solamente los desplazamientos de articulaciones más los sistemas de coordenadas base y de herramienta (4 parámetros de desplazamiento de articulación más 6 parámetros para el sistema base más 6 parámetros para el sistema de la herramienta). La calibración no será tan precisa como si se hubiera utilizado la calibración completa por defecto, pero podría permitir entrar en ciertos parámetros en el controlador del robot y no depender de RoboDK para generar programas de robot.
Para obtener la calibración sólo para los desplazamientos de articulación hay que seleccionar el botón Calib. Param. Y luego el botón de masterización (dentro del menú de calibración del robot).
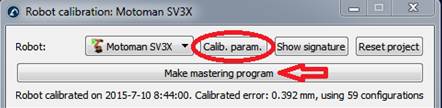

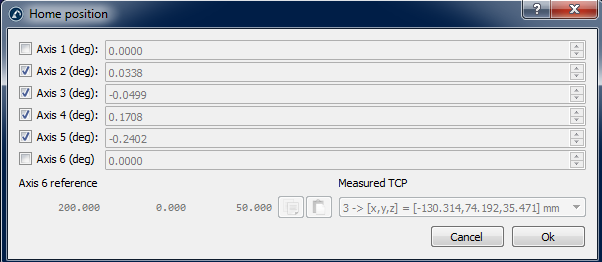
Aparecerá una nueva ventana después de que seleccionemos Hacer masterización del programa. En esta ventana podemos seleccionar qué ejes queremos considerar para la creación de la nueva posición inicial.
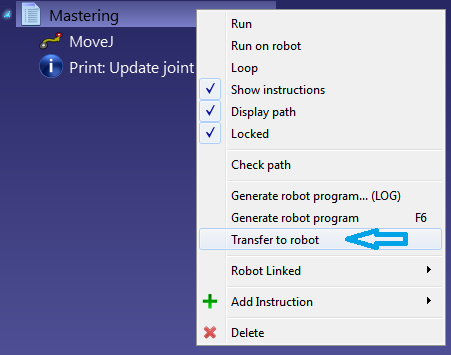
El botón Crear programa de masterización aparecerá en la ventana de calibración del robot. Seleccione este botón para generar un programa que traerá el robot a la nueva posición de inicio. Transfiéralo al robot y ejecútelo,entonces, la nueva posición de partida debe ser registrada.
Si el robot y el PC están conectados, podemos hacer clic derecho en el programa y seleccionar Enviar Programa de robotpara enviar automáticamente el programa al robot. De lo contrario, podemos seleccionar Generar programa de robot para ver los nuevos valores de articulación para la posición inicial.