Sistema de coordenadas de la sonda
En primer lugar, se requieren dos modelos: un modelo de la herramienta y un modelo del sistema de coordenadas base. Un modelo es un objeto definido como una lista de puntos (coordenadas X, Y, Z) que corresponden a los objetivos con respecto a la referencia de modelo (sistema de coordenadas base o de herramienta). Podemos utilizar opcionalmente HandyProbe para colocar el sistema de coordenadas donde se desee.
Debemos seguir estos pasos dos veces para definir los modelos de herramientas y bases:
1.Inicie VXelements y conecte el tracker. Calibre el tracker así como el HandyProbe si se requiere.
2.Seleccione Modelos de Seguimiento desde el árbol izquierdo en VXelements y seleccione Detectar modelo. Seleccione los objetivos que correspondan con un modelo (herramienta u objeto) y seleccione “Aceptar”.

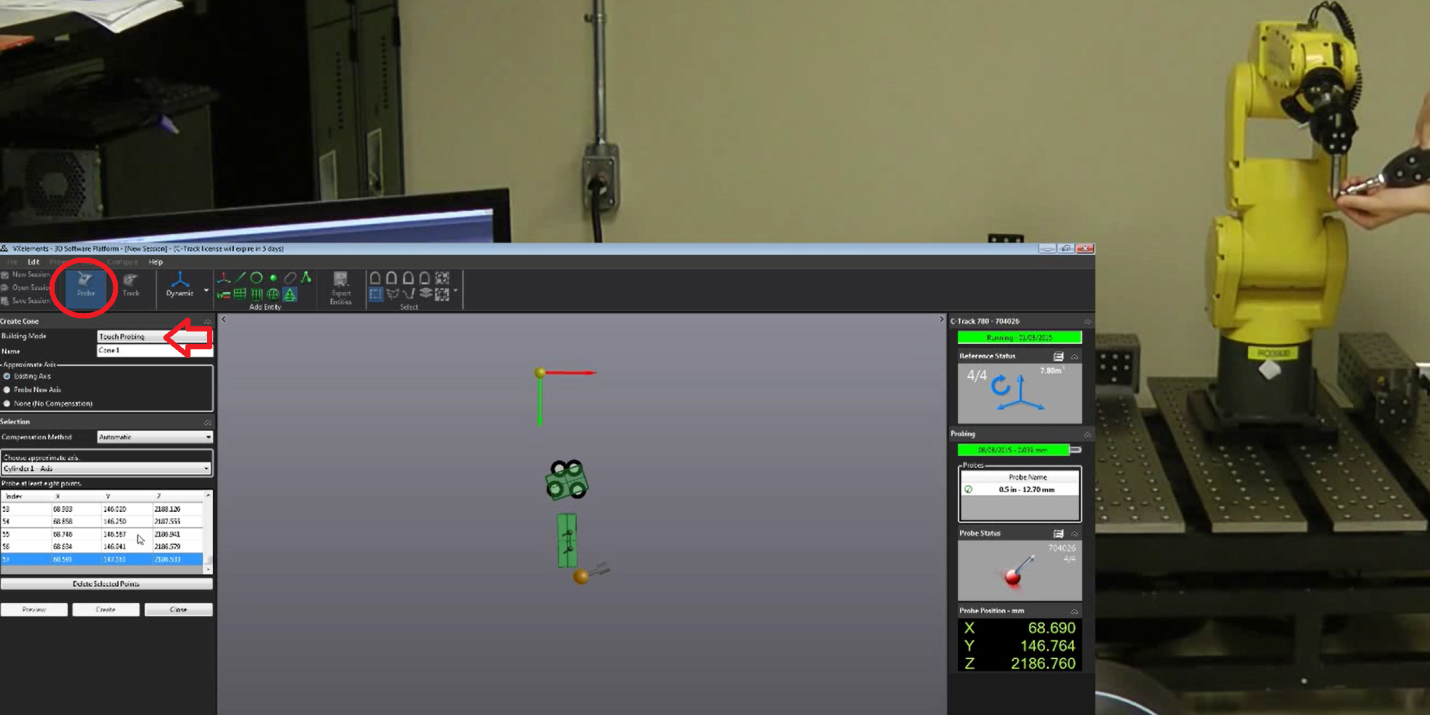
3.El sistema de coordenadas del objeto se puede colocar en una posición específica con respecto a ciertas características del objeto. Este paso es opcional, pero muy recomendable si tenemos que colocar con precisión las características del TCP con respecto a la brida de montaje del robot. Por ejemplo, podríamos colocar con precisión el eje Z de la herramienta a lo largo de un cilindro de referencia que es utilizado como el eje del husillo.
Para mover correctamente el sistema de coordenadas del objeto debemos usar HandyProbe y traer estas características en la sesión virtual de VXelements. El modelo que se utiliza debe ser definido como el modelo de posicionamiento de manera que las características se prueben con respecto a este modelo. Es posible para sondear puntos, líneas, planos, cilindros, conos y definir los sistemas de coordenadas con respecto a estas características.
Cuando terminemos podemos exportar el modelo como un archivo txt. Debemos ver los objetivos en el archivo de texto como una lista de puntos XYZ.