Calibración del robot
La calibración del robot se divide en 4 etapas. Cada paso requiere tomar un conjunto de mediciones. Estos cuatro pasos se deben seguir en orden:
1.Mediciones de referencia de base (3 minutos).
2.Mediciones de referencia de la herramienta (3 minutos)
3.Calibración de mediciones (7 minutos, 60 mediciones)
4.Validación de mediciones (7 minutos, 60 mediciones).
El siguiente vídeo muestra cómo realizar esta calibración en 20 minutos: https://youtu.be/Htpx-p7tmYs. Las mediciones de validación (paso 4) no son obligatorias para calibrar el robot, sin embargo, ofrecen un punto de vista objetivo de los resultados de precisión. También es posible ver el impacto de la calibración del robot en un área y validarlo en un área diferente.
Seleccione el botón de Medir para cada uno de los cuatro conjuntos de mediciones. Esto abrirá una nueva ventana que permite tomar nuevas medidas, así como la importación y exportación de mediciones existentes en un archivo de texto (en formato csv o txt).
Medición de la base
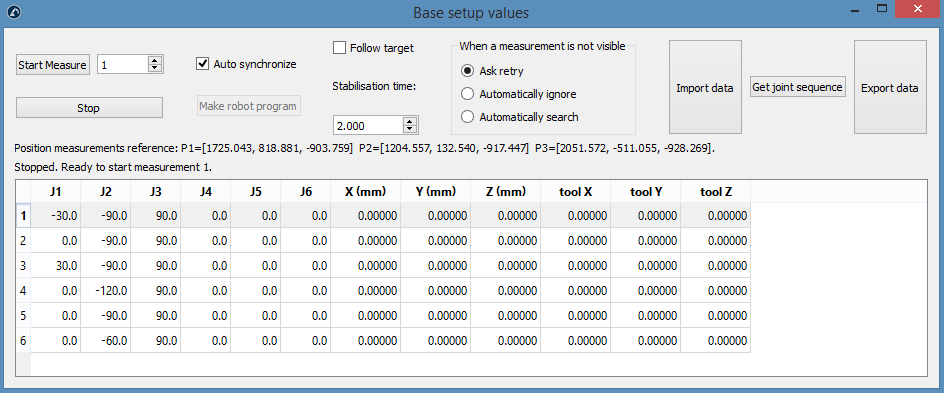
Estas mediciones se pueden realizar en cualquier lugar de la brida de montaje de la herramienta si medimos el mismo objetivo para todas las 6 mediciones. Para iniciar las mediciones, seleccione Medir en la sección de Configuración de la Base. La siguiente ventana se abrirá. Entonces, seleccione Iniciar Medición y el robot se moverá secuencialmente a través de las mediciones programadas.
Cierre mediciones se pueden realizar en cualquier lugar de la brida de montaje de la herramienta si medimos el mismo objetivo para todas las 6 mediciones. Para iniciar las mediciones, seleccione Medir en la sección de Configuración de la Base. La siguiente ventana se abrirá. Entonces, seleccione Iniciar Medición y el robot se moverá secuencialmente a través de las mediciones programadas.
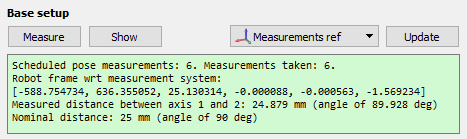
El resumen mostrará la posición y la orientación o el sistema de coordenadas del robot con respecto al sistema de coordenadas de calibración (formato [x, y, z, w, p, r], en mm y radianes)
Medición de la herramienta
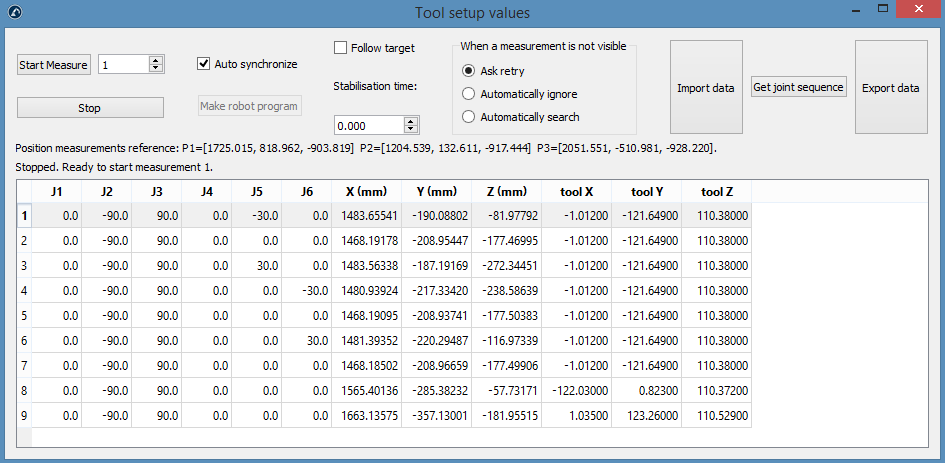
Las mediciones 1-6 se pueden realizar en cualquier lugar de la brida de montaje de la herramienta, siempre y cuando se mida la misma posición para las 6 mediciones. Después de eso, cada TCP que queremos medir añadirá una medición para el mismo TCP, en este caso, tenemos 3 TCP así 6+3=9 mediciones en total. Podemos hacer doble clic en una medida para continuar las medidas de esa posición.
Al igual que el apartado anterior: seleccione Medir en la sección de Configuración de la Herramienta. La siguiente ventana se abrirá. Seleccione Iniciar Medida y el robot se moverá secuencialmente a través de las mediciones planeadas. Haga doble clic en una medida para continuar las medidas desde esa posición.
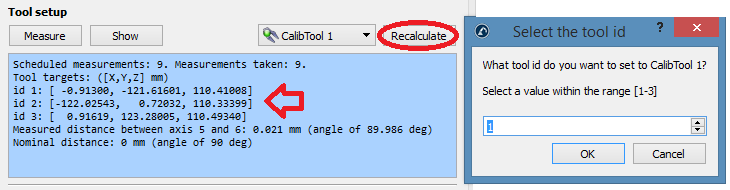
El resumen mostrará los TCPs calibrados cuando se haya completado el procedimiento. La definición del TCP (en la siguiente imagen “CalibTool 1”) se actualizará automáticamente. Si no hemos seleccionado algún TCP, podemos añadir uno nuevo (seleccione “Programa➔Añadir Herramienta (TCP)”) y seleccione “Recalcular”. Una nueva ventana aparecerá y hay que seleccionar el “id” de la herramienta dependiendo del orden en que tomamos las mediciones. Podemos repetir el mismo procedimiento para actualizar tantos TCP como necesitemos (en este caso 3 TCP). La id de la herramienta se detectará automáticamente si el nombre de la herramienta termina con un número.
Calibración
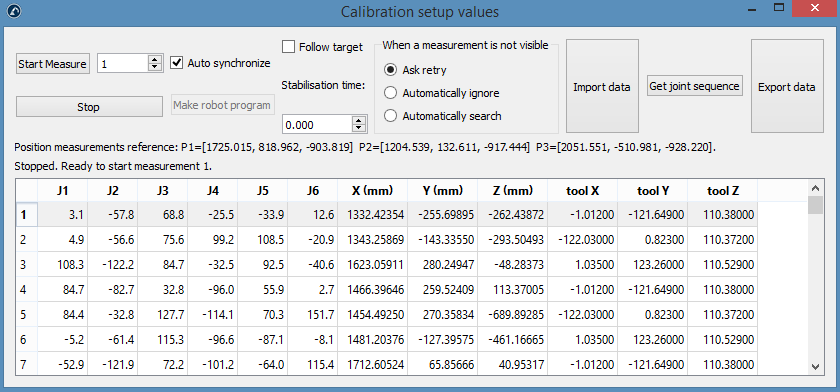
Seleccione Medir en la sección Calibración. La siguiente ventana se abrirá. A continuación, seleccione Iniciar Medición y el robot se moverá secuencialmente a través de las medidas planeadas. Haga doble clic en una medida para continuar desde esa posición.
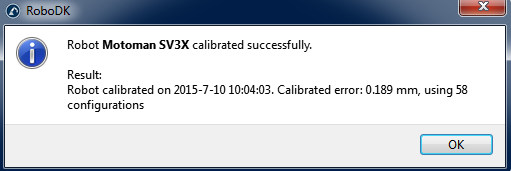
Cierre la ventana cuando se hayan completado las mediciones. El robot se calibra automáticamente y se mostrará el siguiente mensaje si no hay problemas.
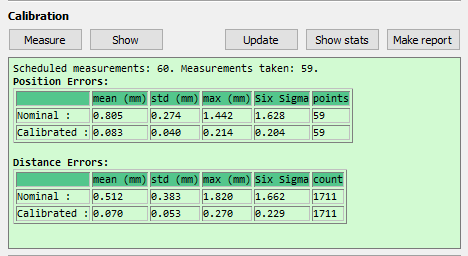
Por último, la pantalla verde mostrará algunas estadísticas con respecto a las medidas de calibración y cuanto se mejora la precisión para esas mediciones.
Validación
No debemos validar la precisión del robot utilizando las mismas medidas que hemos utilizado para calibrar el robot, por lo tanto, se recomienda tomar medidas adicionales para validar la precisión (que tiene un punto de vista más objetivo de los resultados de precisión).
El mismo procedimiento de calibración debe ser seguido para tomar las mediciones de validación. El resumen mostrará las estadísticas de validación. Véase la siguiente Sección Resultados para más información.