Conectar con el robot
La IP del robot (o el número de puerto COM para conexiones RS232) es necesaria para configurar correctamente la comunicación con RoboDK. Siga estos pasos para comprobar la comunicación con el robot:
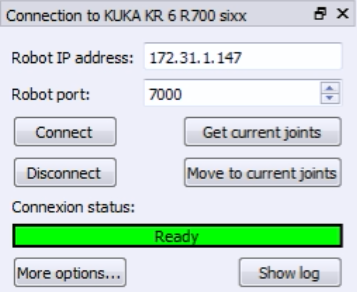
1.Seleccione Conectar➔Conectar robot. Una ventana nueva aparecerá.
2.Establecezca la IP y el puerto del robot (o el puerto COM si la conexión es a través de RS232).
3.Haga clic en el botón Conectar.
4.Consulte el apéndice en caso de problemas.
Si la conexión es exitosa se debería ver un mensaje verde mostrando Listo. La posición del robot virtual debe coincidir exactamente con la posición del robot real si seleccionamos Obtener articulaciones actuales. Alternativamente, seleccionar Mover a articulaciones actuales para mover el robot a la posición actual establecida en el simulador. La ventana se puede cerrar y la conexión permanecerá activa.