Conectar con el tracker
La IP del láser tracker es necesaria para configurar correctamente la comunicación con RoboDK. Siga estos pasos para comprobar la comunicación con el sistema de seguimiento láser:
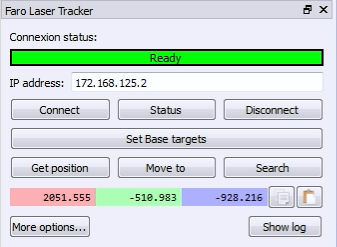
a.Seleccione el menú «Conectar➔Conectar láser tracker». Una nueva ventana debe abrir.
b.Establezca la IP del láser tracker.
c.Haga clic en el botón “Conectar”.
Si la conexión se realiza correctamente debería ver un mensaje verde que muestra “Listo”. La ventana se puede cerrar y la conexión permanecerá activa.