Configuración de calibración del Robot
Se requiere conectar el seguidor láser y el robot a la computadora para automatizar el procedimiento de tomar las mediciones. También es recomendado medir un sistema de coordenadas a través de tres puntos en el caso que movamos el láser tracker (este paso es obligatorio si queremos recuperar la posición inicial para el eje 1, ver anexo II para más información).
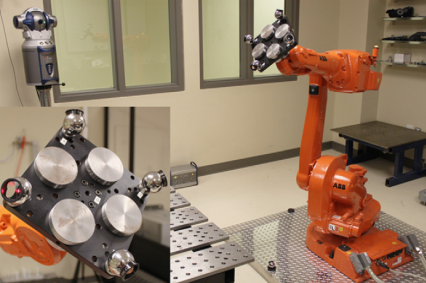
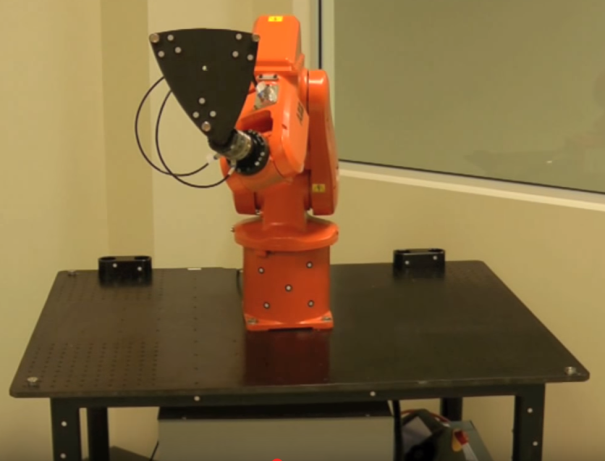
Se requiere adjuntar al menos una posición SMR (tres o más son recomendadas), como se muestran en las siguientes imágenes. También es conveniente utilizar 3 nidos como un sistema de coordenadas si el seguidor láser debe ser movido.
Las siguientes subsecciones deben llevarse a cabo de forma secuencial para estar listo para comenzar a tomar medidas.
Conectar con el tracker
La IP del láser tracker es necesaria para configurar correctamente la comunicación con RoboDK. Siga estos pasos para comprobar la comunicación con el sistema de seguimiento láser:
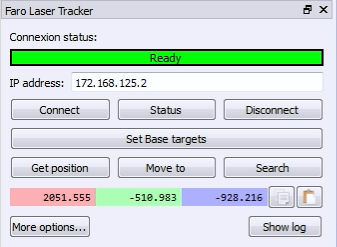
a.Seleccione el menú «Conectar➔Conectar láser tracker». Una nueva ventana debe abrir.
b.Establezca la IP del láser tracker.
c.Haga clic en el botón “Conectar”.
Si la conexión se realiza correctamente debería ver un mensaje verde que muestra “Listo”. La ventana se puede cerrar y la conexión permanecerá activa.
Conectar con el robot
La IP del robot (o el número de puerto COM para conexiones RS232) es necesaria para configurar correctamente la comunicación con RoboDK. Siga estos pasos para comprobar la comunicación con el robot:
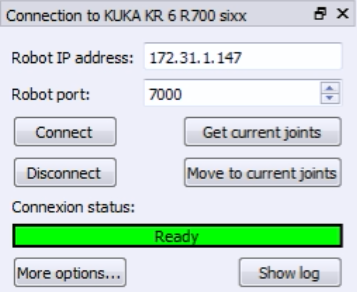
1.Seleccione Conectar➔Conectar robot. Una ventana nueva aparecerá.
2.Establecezca la IP y el puerto del robot (o el puerto COM si la conexión es a través de RS232).
3.Haga clic en el botón Conectar.
4.Consulte el apéndice en caso de problemas.
Si la conexión es exitosa se debería ver un mensaje verde mostrando Listo. La posición del robot virtual debe coincidir exactamente con la posición del robot real si seleccionamos Obtener articulaciones actuales. Alternativamente, seleccionar Mover a articulaciones actuales para mover el robot a la posición actual establecida en el simulador. La ventana se puede cerrar y la conexión permanecerá activa.
Midiendo los objetivos de referencia
Es recomendado medir un sistema de coordenadas de calibración, que se adjunta a la base del robot, esto será útil si queremos mover el tracker durante la calibración o comparar dos calibraciones del robot. El sistema de coordenadas de calibración debe ser definido por 3 puntos tangibles.
Podemos omitir este paso si no vamos a mover el tracker con respecto al robot o no necesitamos recuperar la posición inicial para el eje 1. En este caso, se utilizará la referencia del láser tracker.
Debemos seguir estos pasos cada vez que el láser tracker sea movido:
1.Seleccione Conectar➔Conectar láser tracker.
2.Establecer la IP del láser tracker y seleccionar Conectar (si el láser tracker no está conectado).
3.Establezca la referencia de calibración y la referencia del tracker como se muestra en la imagen. La referencia de calibración también se conoce como “Referencia de mediciones”.
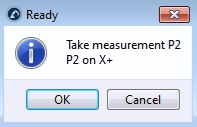
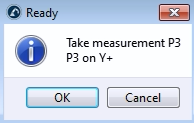
4.Seleccionar Establecer objetivos Base.
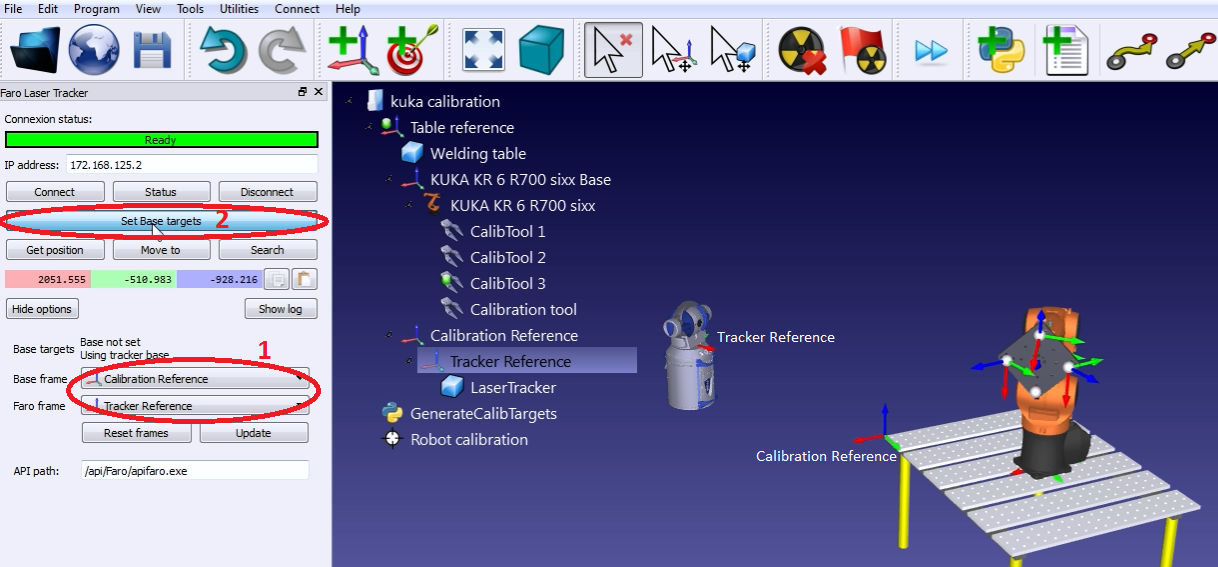
RoboDK guiará al usuario con los menúes mostrados en la siguiente imagen. La posición del láser tracker se actualiza automáticamente con respecto a la referencia de calibración cuando se ha completado el procedimiento.