Generar objetivos de calibración
Hay cuatro conjuntos de mediciones que se requieren para lograr con éxito la calibración del robot:
1.Configuración de la Base: Se requieren seis mediciones (o más) de movimiento en los ejes 1 y 2 para colocar la referencia de calibración con respecto al robot. Seleccione Mostrar en la ventana de configuración de calibración y el robot se moverá a lo largo de la secuencia.
2.Herramienta de configuración: Se requieren siete o más mediciones para calibrar la herramienta de brida de montaje y los objetivos de la herramienta (eje 5 y 6 en movimiento). Seleccione Mostrar y el robot se moverá a lo largo de la secuencia.
3.Mediciones de calibración: Se requieren 60 mediciones o más para calibrar el robot. Estas mediciones pueden ser colocadas aleatoriamente en el espacio de trabajo del robot y libre de colisión con los objetos circundantes.
4.Mediciones de validación (opcional): se pueden usar tantas mediciones como se desee para validar la precisión del robot. Estas mediciones se utilizan únicamente para validar la precisión del robot y no para calibrar el robot.
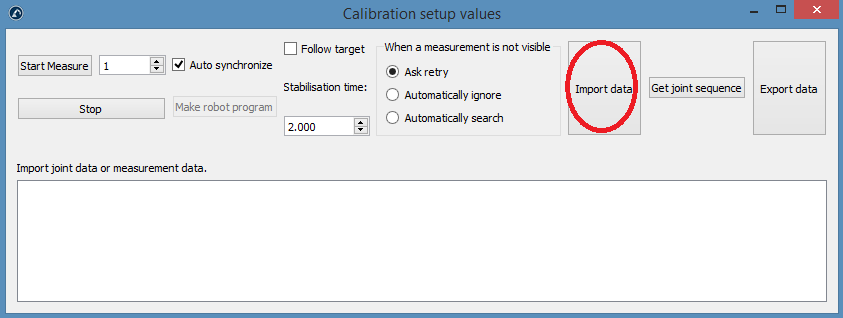
Los dos primeros conjuntos de mediciones se generan automáticamente por RoboDK. Seleccione Mostrar y el robot seguirá la secuencia (como se muestra en las siguientes imágenes). Si la secuencia tiene que ser cambiada, seleccione Medir y exportar las medidas de calibración como un archivo CSV seleccionando Exportar Datos. Este archivo puede ser editado usando una hoja de Excel y volver a importar haciendo clic en Importar datos.
Los últimos dos conjuntos de mediciones (de calibración y validación) pueden generarse usando la secuencia de comandos macro llamada “
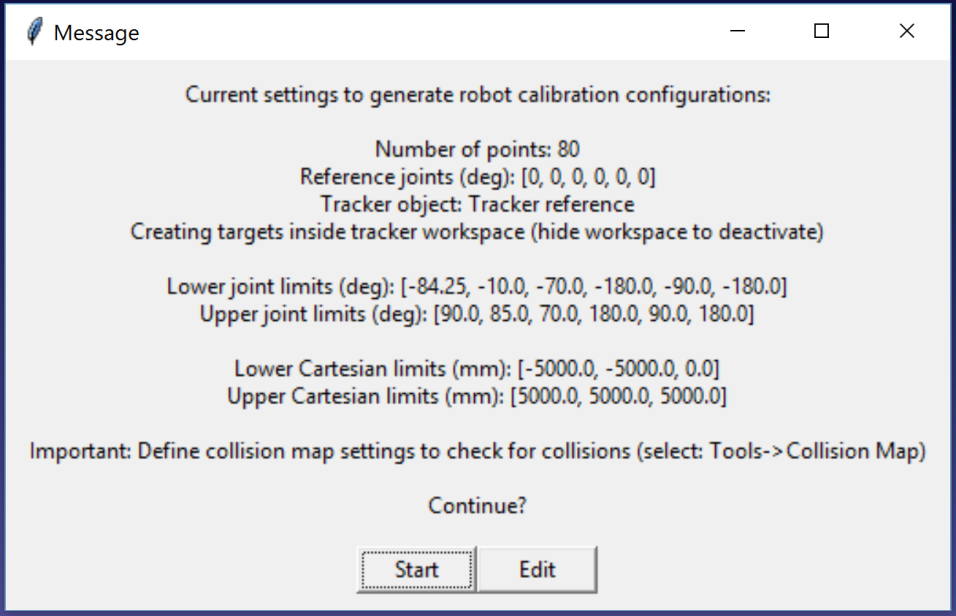
●Número de mediciones: El número de mediciones a generar. Por defecto, se utilizan 80 mediciones porque se requiere un mínimo de 60 mediciones para la calibración del robot.
●Posición de referencia: La posición de referencia debe ser una posición del robot donde la herramienta se enfrenta el tracker con objetivos visibles.
●Límites de articulación: Se deberán precisar los límites inferior y superior de cada articulación.
●Límites cartesianos: Podemos proporcionar límites cartesianos (valores X,Y,Z) con respecto al sistema de coordenadas del robot.
La secuencia de comandos genera automáticamente mediciones en las que la herramienta se enfrenta al tracker así como respecto a las restricciones articulares y cartesianas. Se permite un giro de +/- 180 grados alrededor de la herramienta alrededor de la dirección que se enfrenta el tracker en la posición de referencia. Además, la secuencia de movimientos de la articulación es libre de colisión y dentro del espacio de trabajo de medición (si se establece como visible el espacio de trabajo). La siguiente imagen muestra el resumen que se presenta al usuario antes de que comience la secuencia automática. Puede tomar hasta 5 minutos para que la secuencia finalice.
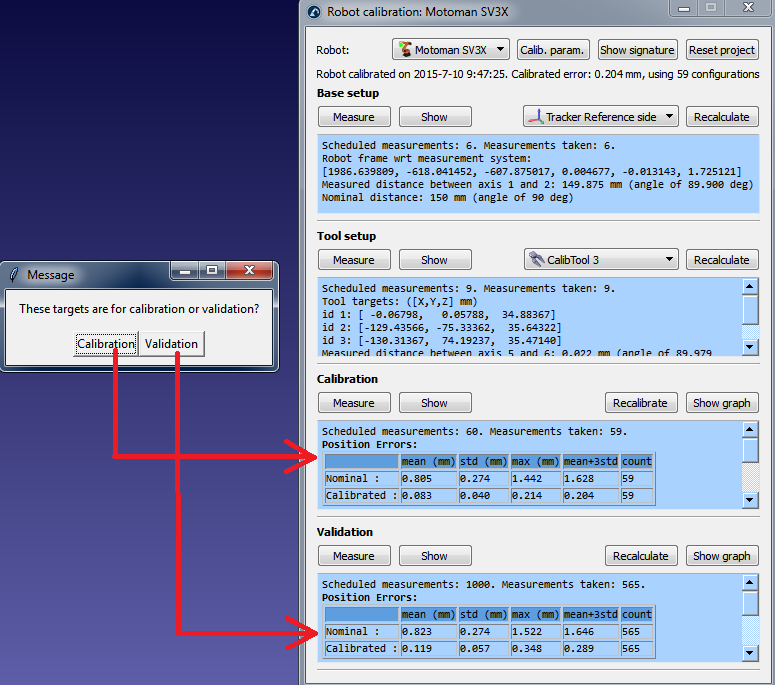
Un nuevo mensaje aparecerá una vez que el algoritmo termine. Seleccione Calibración para usar las 60 mediciones de calibración del robot. Podemos volver a ejecutar la misma secuencia de comandos para generar otra serie de medidas para la validación. Este paso es opcional, pero 60 mediciones ore más son recomendados para fines de validación.
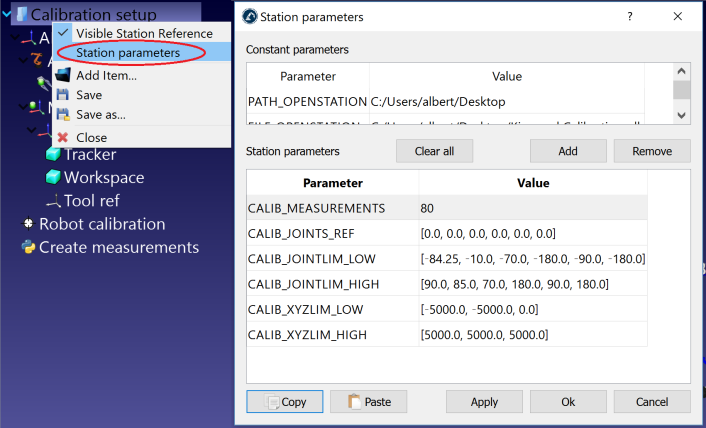
Si se desea, se puede modificar el script haciendo clic derecho en el script Crear mediciones y seleccionar Editar Script, luego, modifique los parámetros adicionales del algoritmo. El script guarda automáticamente la entrada del usuario como parámetros de la estación. Podemos ver, editar o borrar estos ajustes haciendo clic derecho en la estación y seleccionando los parámetros de la estación, como se muestra en la siguiente imagen.
Por último, también es posible importar las configuraciones que han sido seleccionadas de forma manual mediante la selección de los datos de importación (dentro del menú Medición). Podemos importar un archivo TXT o CSV como una matriz NX6, donde N es el número de configuraciones.