Midiendo los objetivos de referencia
Es recomendado medir un sistema de coordenadas de calibración, que se adjunta a la base del robot, esto será útil si queremos mover el tracker durante la calibración o comparar dos calibraciones del robot. El sistema de coordenadas de calibración debe ser definido por 3 puntos tangibles.
Podemos omitir este paso si no vamos a mover el tracker con respecto al robot o no necesitamos recuperar la posición inicial para el eje 1. En este caso, se utilizará la referencia del láser tracker.
Debemos seguir estos pasos cada vez que el láser tracker sea movido:
1.Seleccione Conectar➔Conectar láser tracker.
2.Establecer la IP del láser tracker y seleccionar Conectar (si el láser tracker no está conectado).
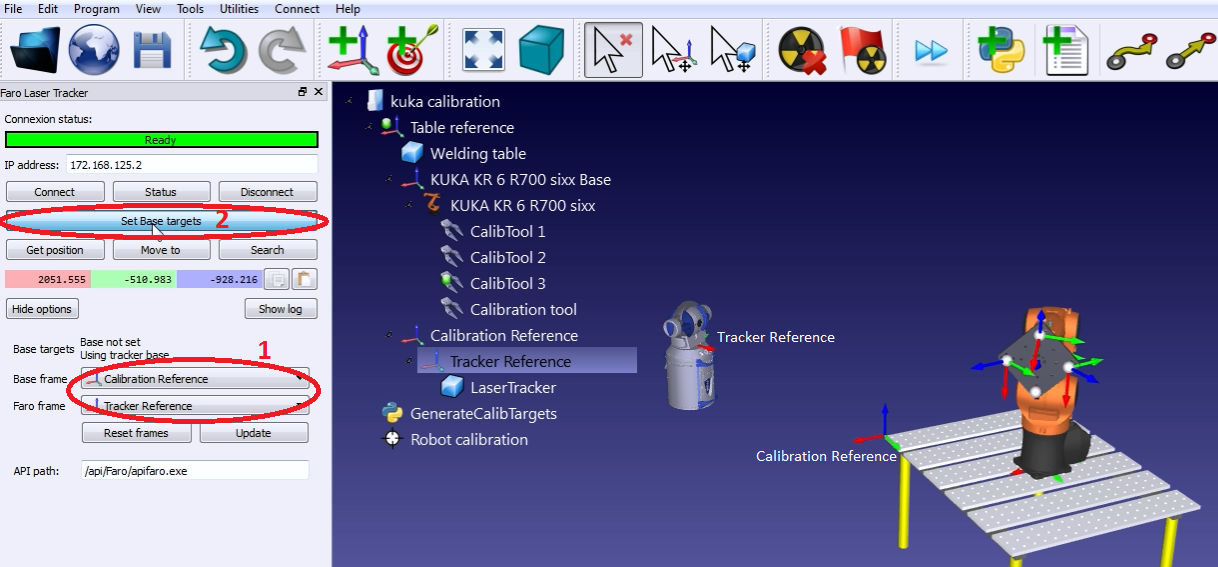
3.Establezca la referencia de calibración y la referencia del tracker como se muestra en la imagen. La referencia de calibración también se conoce como “Referencia de mediciones”.
4.Seleccionar Establecer objetivos Base.
RoboDK guiará al usuario con los menúes mostrados en la siguiente imagen. La posición del láser tracker se actualiza automáticamente con respecto a la referencia de calibración cuando se ha completado el procedimiento.