Referencia del eje 6
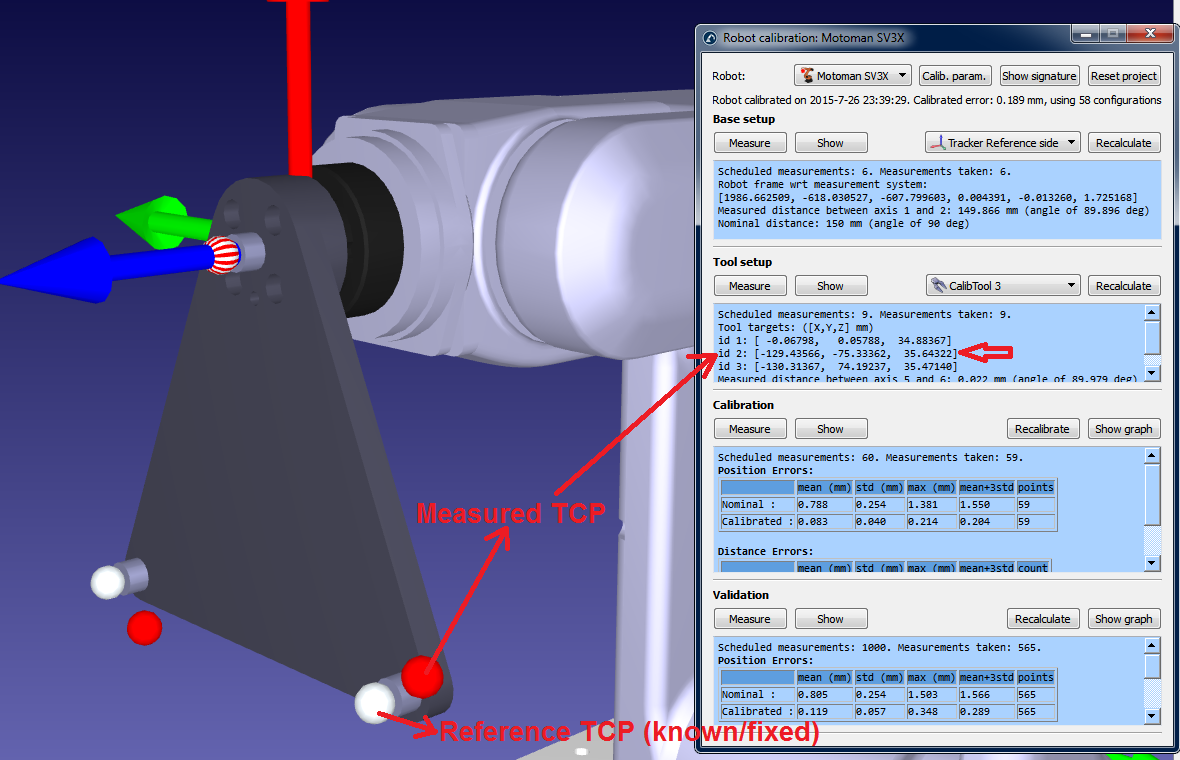
Debemos usar un objetivo de referencia para configurar apropiadamente la posición de “inicio” del eje 6. El ángulo de compensación será la rotación alrededor del eje Z de la brida de montaje de la herramienta necesaria para adaptarse mejor al TCP medido (X, Y, Z) con la referencia conocida del TCP. El TCP medido (ver la siguiente imagen) es uno de los TCP que fue medido en el paso dos del procedimiento de calibración. El TCP de referencia es una referencia conocida que corresponde a uno de los TCP para la herramienta de calibración que se ha utilizado.
Idealmente, el TCP de referencia debe ser medido por el CMM con respecto a la brida de montaje de la herramienta (una réplica de la brida de montaje de la herramienta del robot sería lo mejor). Alternativamente, podemos utilizar un nuevo robot para medir el TCP (paso dos del procedimiento de calibración) por primera vez y utilizar un TCP medido como referencia. Es importante utilizar un pin pasador y/o la referencia apropiada de la brida de montaje de la herramienta para asegurarse de que el efector final sea colocado siempre en la misma posición.