Resultados
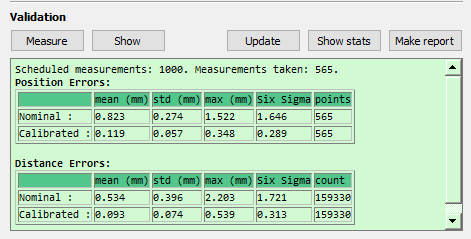
Una vez que se ha completado la calibración podemos analizar la mejora de la precisión mediante la lectura de las estadísticas proporcionadas por RoboDK. Para visualizar estas estadísticas, abra la ventana de calibración del robot (doble clic en el icono de Calibración del Robot). La ventana de resumen en la sección de validación mostrará los errores antes de la calibración (cinemática nominal) y después de la calibración (cinemática calibrada). Dos tablas se proporcionan, una muestra las estadísticas relativas a los errores de posición y la otra muestra errores de distancia:
●Errores de posición: El error de posición es la precisión que el robot puede alcanzar en un punto con respecto a un sistema de coordenadas.
●Errores de distancia: El error de distancia se obtiene mediante la medición del error de distancia de los pares de puntos. La distancia entre dos puntos vistos por el robot (obtenida usando las cinemáticas calibradas) se compara con la distancia vista por el sistema de medición (físicamente medido). Todas las combinaciones son tomadas en cuenta. Si tomamos 315 mediciones tendremos 315x315/2=49455 valores de error de distancia.
Las estadísticas proporcionadas son el error medio, la desviación estándar (std) y el error máximo. También se proporciona la media más tres veces la desviación estándar, que corresponde al error esperado para el 99,98% de todas las mediciones (si tenemos en cuenta que los errores siguen una distribución normal).).
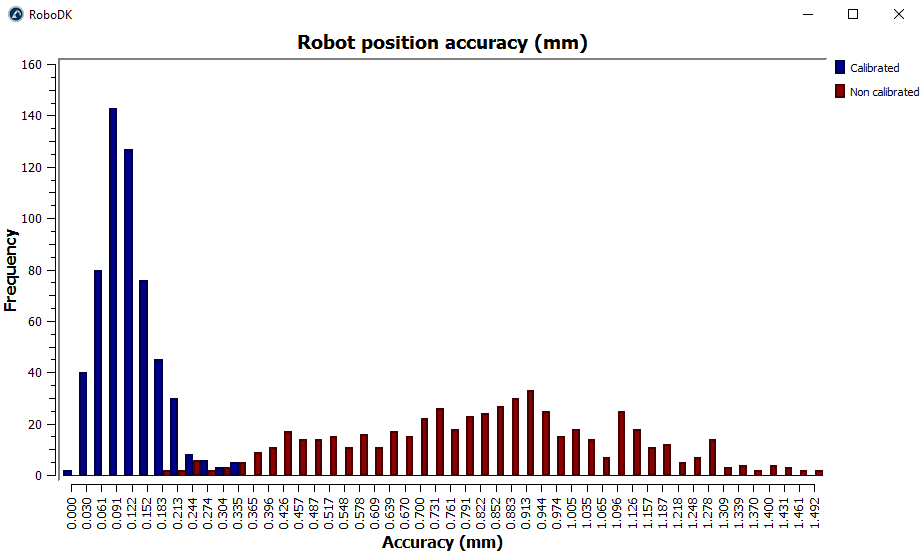
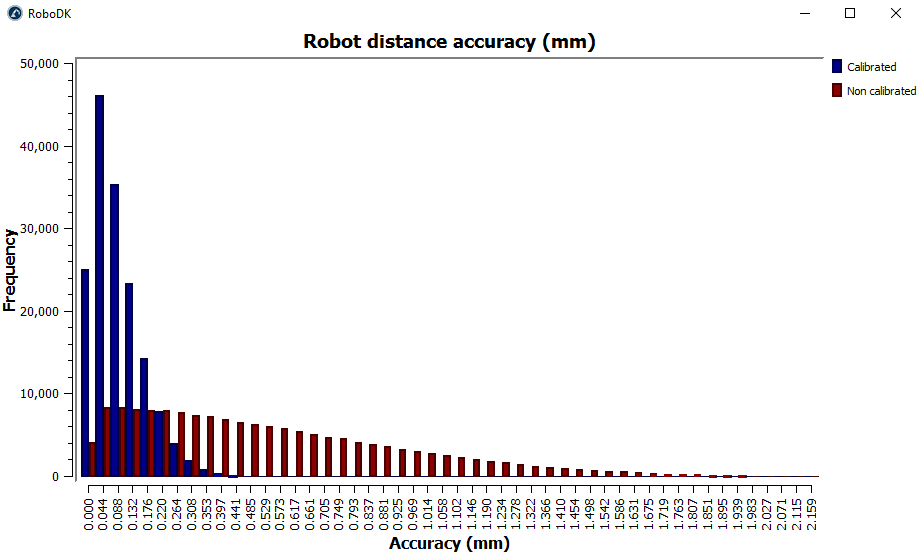
Seleccione Mostrar estadísticas y dos histogramas mostrarán la distribución de los errores antes y después de la calibración, un histograma de exactitud de la posición y la otra que muestra la precisión de la distancia. Las siguientes imágenes corresponden a las 315 mediciones de validación utilizadas en este ejemplo.
.
Por último, podemos seleccionar “Hacer reporte” y un informe en formato PDF con la información presentada en esta sección será generado.